Технологии из прошлого: телетайп. Разбираемся в устройстве, воскрешаем старый аппарат
Телетайп, телепринтер (teletype, TTY) — стартстопный приемо‑передающий телеграфный аппарат с клавиатурой, аналогичной пишущей машинке. В отличие от обычного телеграфа, где сообщение передается посимвольно, с помощью точек и тире, этот аппарат позволяет передавать текстовое сообщение, просто набирая его на клавиатуре. Также аппарат может принимать сообщение, печатая его на бумаге. Девайс широко применялся в качестве терминальных устройств вычислительной техники на заре ее становления. Благодаря этому факту эта технология оставила много артефактов в истории IT, многие из которых сохранились и до настоящего времени. Это различные компьютерные терминалы, терминалы tty в Linux, некоторые команды терминала и даже известный многим электронщикам и программистам интерфейс UART.
На просторах интернета уже было несколько статей, посвященных этой технологии: тыц, тыц, тыц. Это, по большей части, обзорные статьи, где техническая сторона вопроса упоминается вскользь или не рассматривается вовсе. В этой статье мы разберемся в устройстве телетайпа в процессе восстановления реального аппарата Т-63.
В вышеупомянутых статьях история развития технологии описана достаточно подробно, поэтому не будем на ней останавливаться. А вот некоторые вещи необходимо повторить, без этого дальнейшее повествование будет непонятным. Прежде всего, это касается способа кодирования информации — кода Бодо.
Код Бодо — это синхронный пятибитный двоичный код. А также собирательное название всех пятибитных двоичных кодов, используемых для передачи информации по телеграфу. Оригинальный код Бодо был стандартизован международным стандартом ITA1, модифицированный код Бодо‑Мюррея стандартизован стандартом ITA2. В отличие от оригинального кода Бодо, этот код — асинхронный или в терминологии тех лет — старт‑стопный. На основе стандарта ITA2 было разработано множество региональных стандартов телетайпной связи для каждой страны, которые, как правило, были обратно совместимы со стандартом ITA2. В США это стандарт US‑TTY, в СССР — стандарт МТК-2 (Международный Телеграфный Код № 2).
Код МТК-2
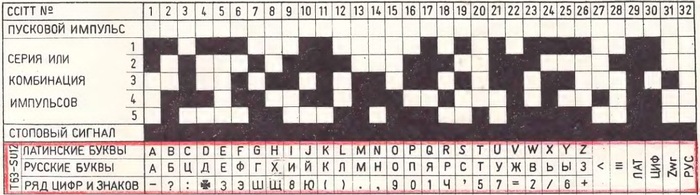
МТК-2 содержит 86 символов (из них различных — 85): 26 букв латинского алфавита, 31 букву русского алфавита (Ё и Ъ не используются), 10 цифр, 11 орфографических, пунктуационных и математических знаков, а также 8 управляющих символов (в том числе пробел). Символы, имеющие графическое (печатное) представление на телеграфной ленте (в том числе управляющие символы «Кто там?» и «Звонок»), разбиты на три регистра (группы символов) — латинского алфавита, русского алфавита и цифр/знаков, а остальные (непечатаемые) символы являются общими для всех регистров. Переключение регистров осуществляется с помощью соответствующих управляющих символов.
Принятый в МТК-2 вариант фонетического соответствия букв латинского и русского алфавитов был отражён в раскладке клавиатуры трёхрегистровых русскоязычных телетайпов, работающих в данном коде: в ней совмещены русская раскладка ЙЦУКЕН и производная от неё латинская фонетическая раскладка JCUKEN. Впоследствии данную раскладку унаследовали средства советской вычислительной техники, из‑за чего компьютерные кодировки символов КОИ-7 и КОИ-8 используют то же соответствие алфавитов, что и МТК-2, а ДКОИ — обусловленный им неалфавитный порядок следования русских букв в кодовой таблице.
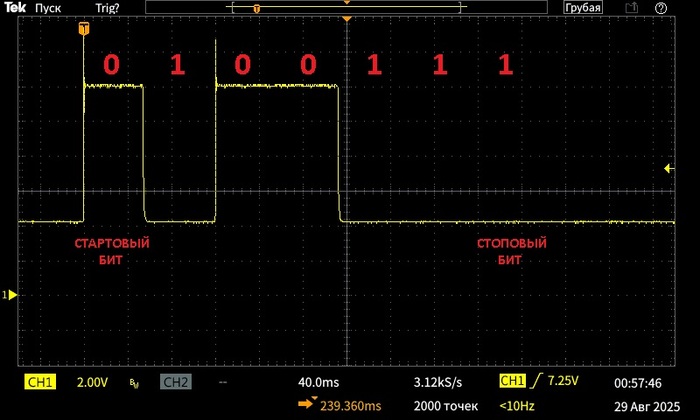
Код Бодо передается в линию последовательно, асинхронно. Для обозначения начала посылки символа используется стартовый бит, затем передаются пять информационных бит и посылка завершается передачей стопового бита. Никакая модуляция не используется. Наличие тока в цепи обозначает лог. 1, а отсутствие тока — лог. 0. Аналогичным образом работает интерфейс UART, за исключением того, что в посылке может быть не пять бит, а более (обычно 8), и стоповых бита может быть не один, а более.
Схема соединения двух телетайпных аппаратов почти один‑в-один повторяет схему соединения двух телефонных аппаратов.

Упрощенная схема соединения
Только вместо микрофона — нормально замкнутый контакт (контакты) передатчика телетайпа, вместо телефона — электромагнит приемника и вместо аналогового звукового сигнала передаются импульсы тока. Да, как и в телефонии, сигнал передается током, а не напряжением, благодаря чему работа аппаратов не зависит от длины линии. В нормальном, неактивном состоянии все контакты замкнуты, все электромагниты притянуты, по цепи течет ток (примерно 40 мА). Если один аппарат начинает посылку, размыкая и замыкая контакт, то передаваемый символ проходит как через свой приемник, так и через приемник другого абонента. Оба приемника печатают одинаковый текст. Аналогично, если символ посылает второй абонент, то он также печатается как у отправителя, так и у получателя. Если оба аппарата начнут передачу одновременно, то в линии будет мешанина и оба аппарата напечатают какой то ошибочный символ. Оператор за передающим аппаратом это увидит и перезапустит передачу. Чтобы исключить такие ситуации, в тексте сообщения используются сигналы для маркировки начала и конца передачи. Например, сеанс связи обычно начинался с посылки команды «Кто там?». Некоторые модели телетайпов имели систему автоматического распознавания этой команды и выдачи в ответ в линию заранее запрограммированной последовательности символов, обозначающей абонента. Отправитель получал это сообщение, убеждался в том, что его скоммутировали верно и начинал передачу основного послания. Также в телетайпе широко применялись международные трехбуквенные Q‑коды, которые знакомы многим радиолюбителям.
Приемник и передатчик синхронизируются стартовым битом, но для того чтобы символ был принят верно, они должны работать синхронно. Поскольку это полностью электромеханическая система, синхронность обеспечивается одинаковой скоростью вращения приводных двигателей. Для этого применяются те или иные способы стабилизации скорости вращения этих двигателей.
Поскольку телефонные и телетайпные сигналы довольно похожи, на телефонных сетях была развернута телеграфная коммутируемая сеть «Телекс», которая во многих местах работает и до сих пор. Сигнализация (вызов абонента, набор номера) в этой сети происходит почти аналогично телефонной сети.

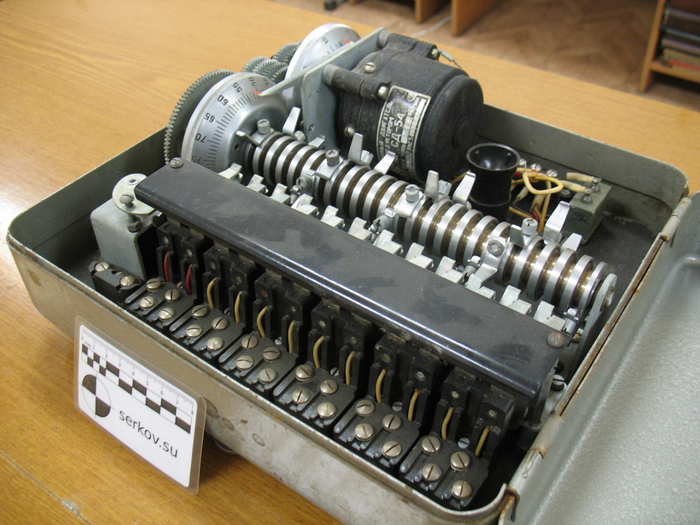
Телетайп, вид спереди
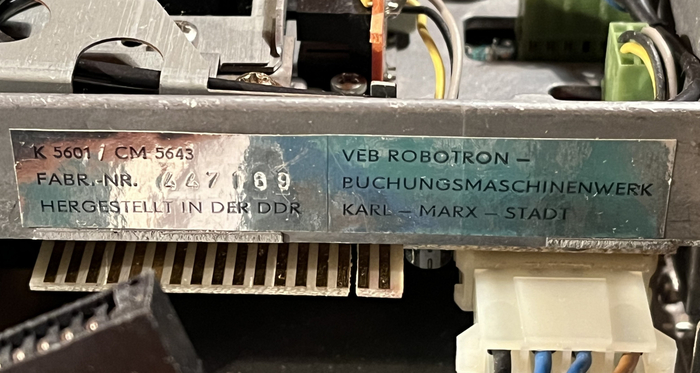
Это была общая информация, а теперь рассмотрим как же это все реализовано в железе. Причем, в железе — в прямом смысле этого слова. Попавший мне в руки аппарат — телетайп Т-63, 1983 года выпуска, производства фирмы RFT из города Карл‑Маркс‑Штадт (сейчас Хемниц), ГДР.

Шильдик аппарата
Аппарат в неисправном состоянии, долго хранился в сыром подвале, но благодаря обилию смазки и толстому слою налипшей грязи был практически не тронут ржавчиной. Его необходимо разобрать, отмыть, заново смазать и попробовать запустить.

Вид сбоку
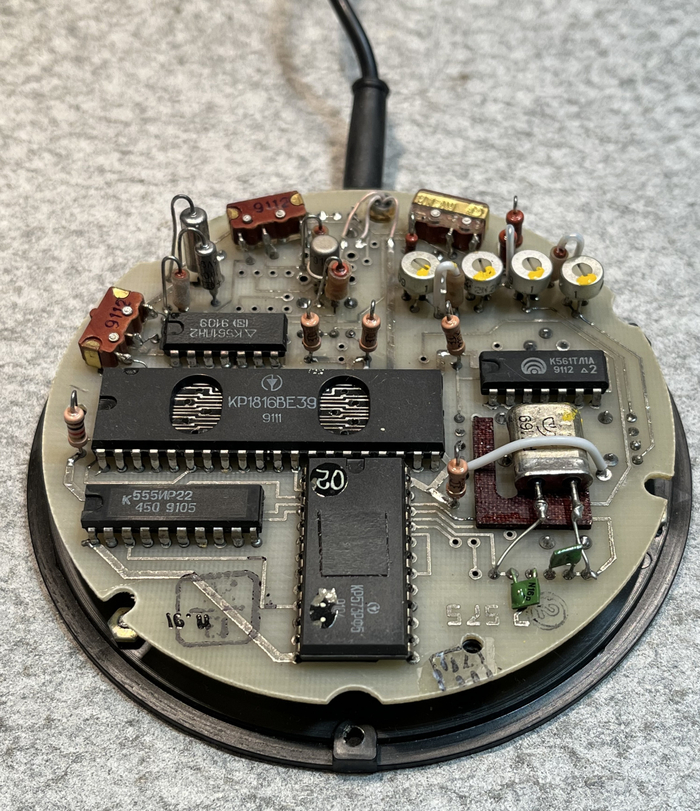
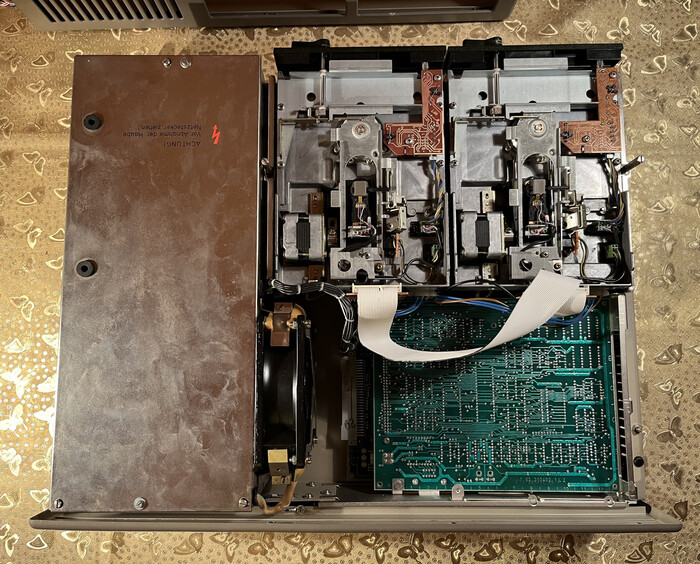
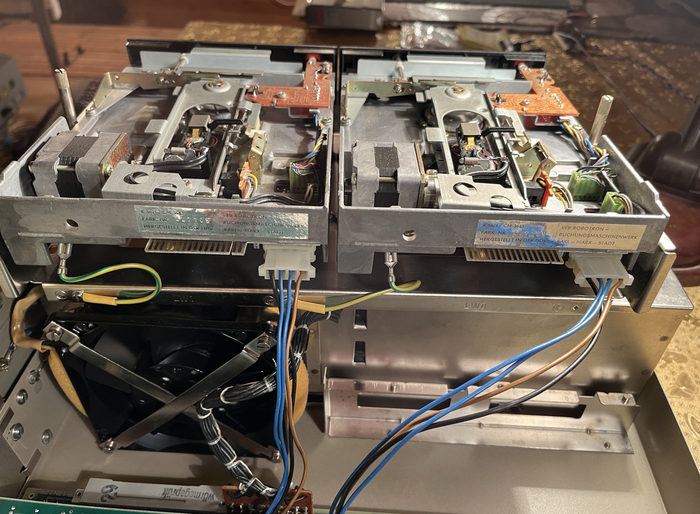
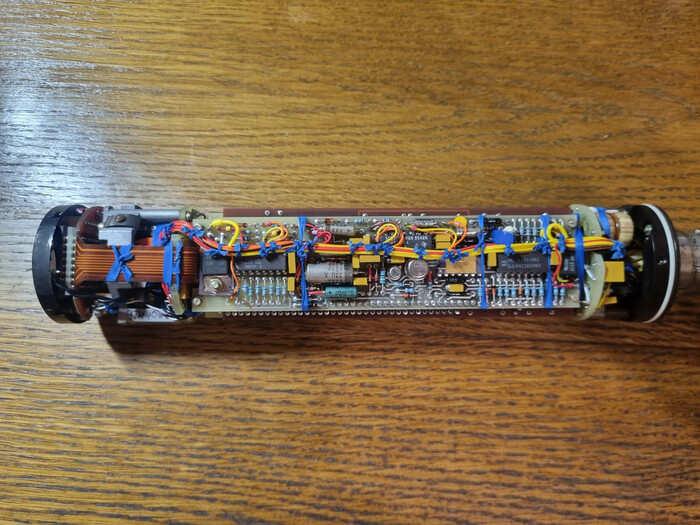
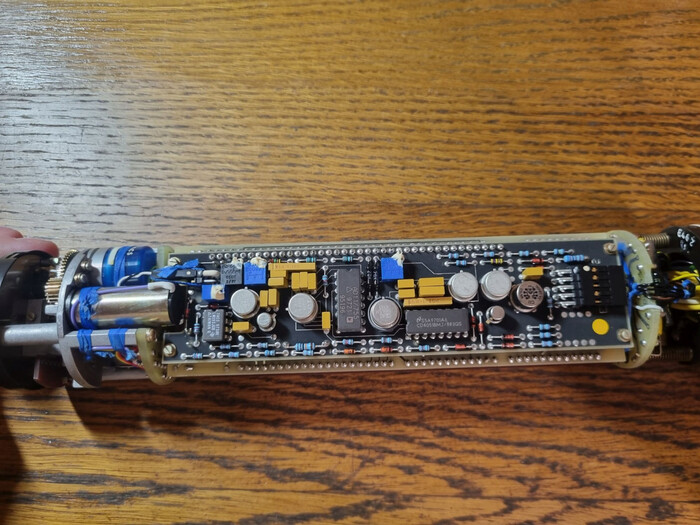
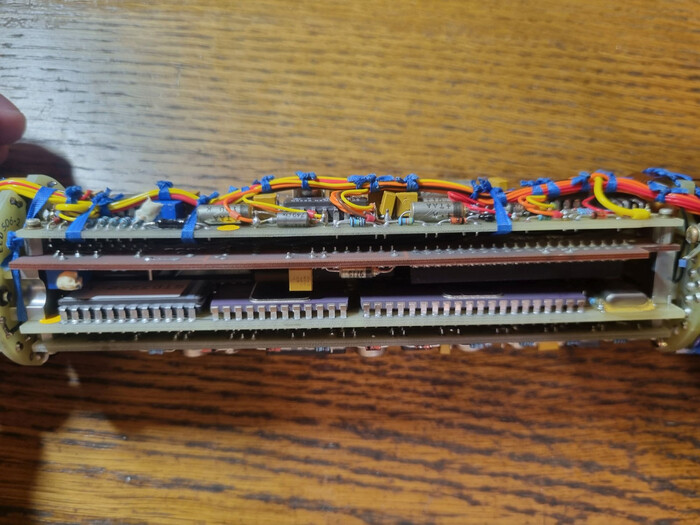
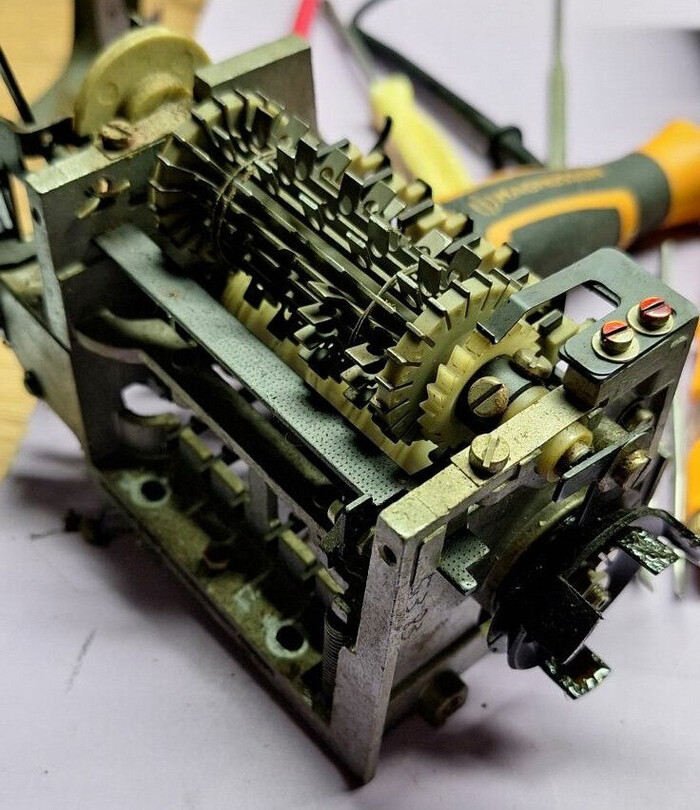
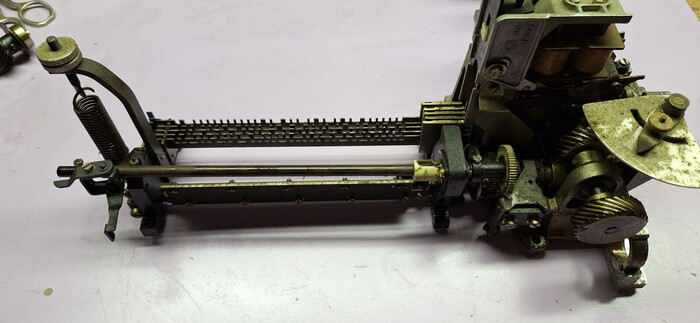
Устройство состоит из передающей части, которая включает в себя клавиатуру и передатчик, приемной части, состоящей из приемника и печатающего устройства. Обе части приводятся во вращение электродвигателем. Также дополнительно аппарат комплектуется реперфоратором — устройством, параллельно кодирующим печатаемый текст на перфоленту (на фото ниже — в левой части).

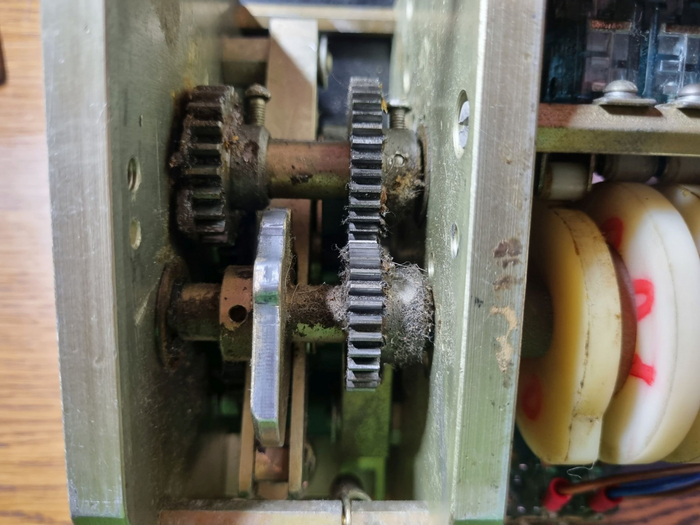
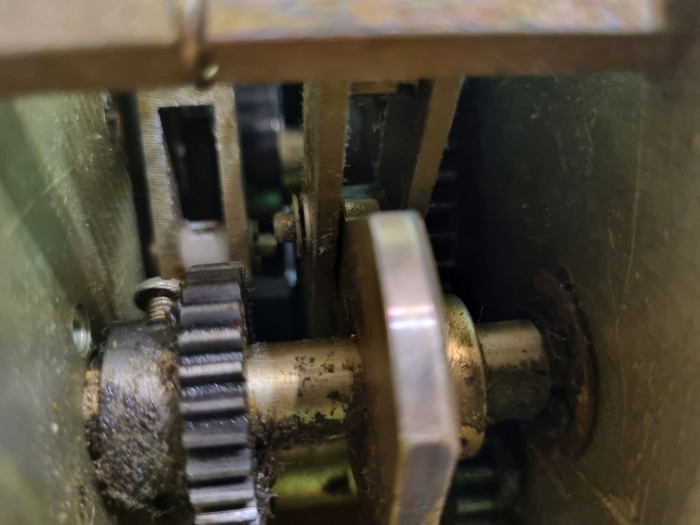
Крупным планом
Перфолента используется для предварительной подготовки передаваемых данных. Так как, обычно, канал связи весьма загружен, передавать сообщение, медленно набирая его на клавиатуре — это нерациональное использование времени канала. Поэтому послание предварительно, не торопясь, набивают на перфоленте, а потом уже эту перфоленту прогоняют через передатчик на максимально возможной скорости. Также, предварительная подготовка сообщения на перфоленте позволяет отправить одно и то же сообщение разным абонентам.
По правде сказать, я не удержался и попытался запустить аппарат в таком состоянии, предварительно обильно пролив маслом все трущиеся места (ведь все равно его потом отмывать). Предварительно была обнаружена неисправность двигателя, а конкретно его центробежного регулятора скорости вращения. Между щетками и кольцами регулятора не было контакта, слышалось искрение и даже шел небольшой дымок. Регулятор я пока заблокировал, зашунтировав его перемычкой, а скорость вращения регулировал изменяя напряжение питания с помощью стенда. Конечно, скорость вращения была далека от номинала и изменялась в широком диапазоне в зависимости от текущей механической нагрузки на двигатель, но при работе аппарата самого на себя это не имеет значения, поскольку и приемный и передающий узел приводятся во вращение от одного и того же вала и потому между собой они всегда синхронны. Далее для работы приемного узла необходимо через него пропустить ток примерно 40 мА. Это я осуществил с помощью лабораторного БП, подав напряжение порядка 12 В.
Далее обнаружилась полная неработоспособность передающего узла. Все контакты были очень сильно окислены и вообще не замыкались. Их чистка мелкозернистой наждачкой не помогла, надежного контакта по прежнему не было. Поэтому и начнем восстановление с этого узла.
Что удобно, в этом телетайпе все блоки, даже несмотря на их механическую связь, сделаны отдельными, относительно легкосъемными устройствами. Чтобы снять передатчик достаточно открутить три винта и сдвинуть вправо приводной вал. Рассмотрим его устройство.

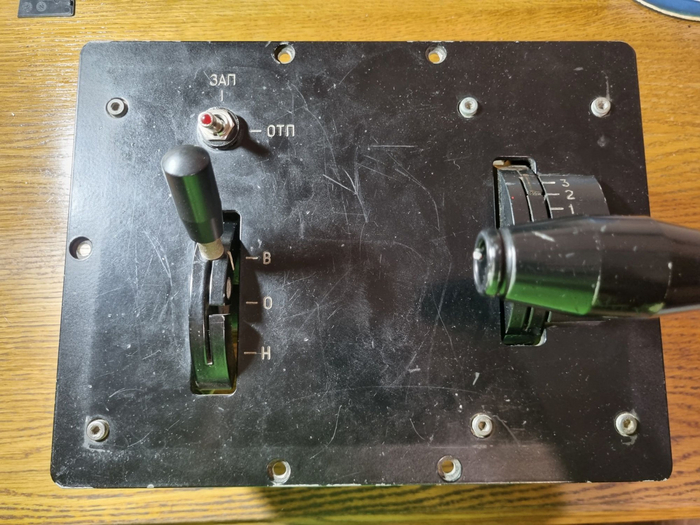
Контакты передатчика
Его основой являются 6 контактных пар, на которые воздействуют толкатели, приводимые в движение кулачковым механизмом. Почему контактов шесть? Пять из них формируют код Бодо, а шестой — стартовый и стоповый импульсы. Все шесть контактов включены параллельно. В стартовой позиции все контакты разомкнуты, кроме шестого — он замыкает цепь. Вал с кулачками заблокирован. Вращение на блок передается через муфту повышенного трения. Трение обеспечивается смоченными маслом фетровыми фрикционами. При нажатии на любую клавишу через спусковой механизм кулачковый вал освобождается и делает один оборот, после чего снова останавливается.
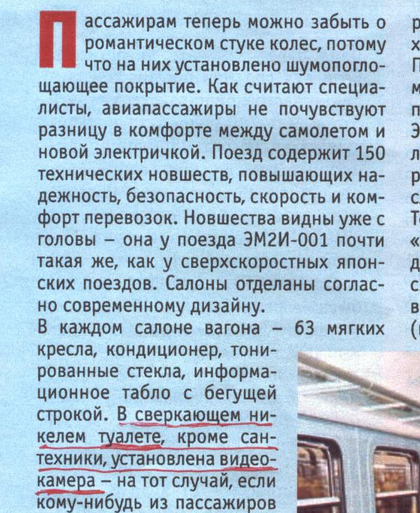
Спусковой механизм (внизу слева)
За время одного оборота первым делом размыкается шестой контакт и формирует стартовый бит. Затем кулачками нажимается первый контакт, потом второй, третий и т. д. — формируется 5-битовая посылка. В конце шестой контакт снова замыкается — это стоповый бит. Привод от кулачков к контактам осуществляется через коромысла.
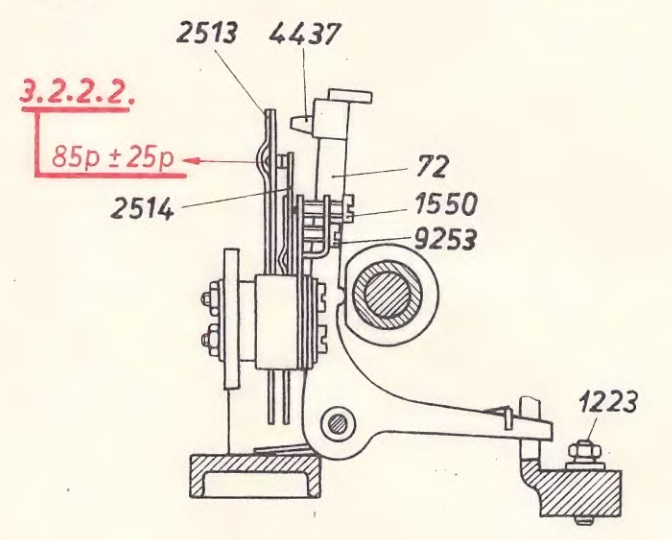
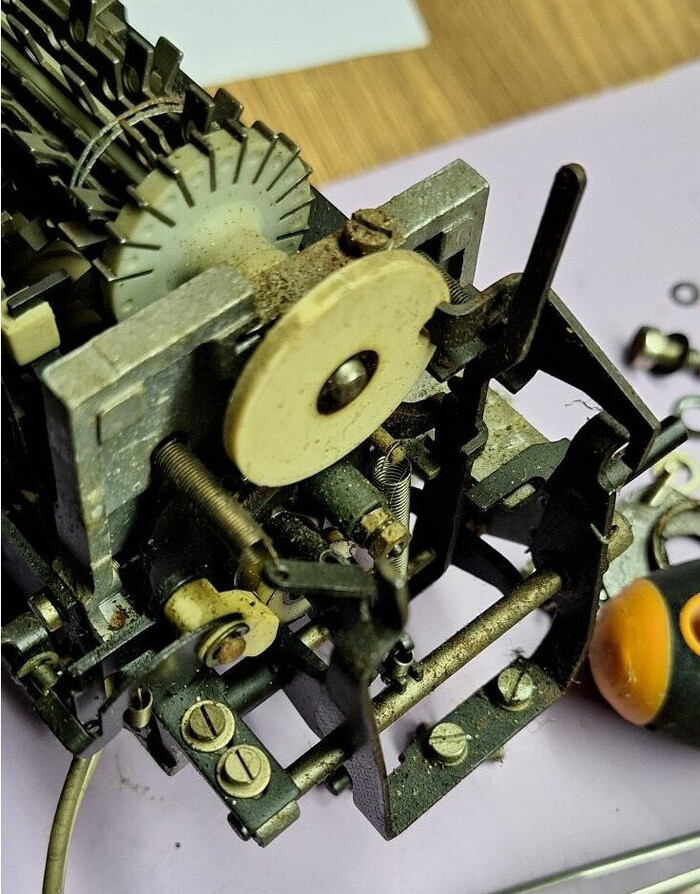
Чертеж части передающего узла
А коромысла управляются снизу пятью подвижными планками с упорами. При нажатии кнопки эти планки сдвигаются в одну из 32 комбинаций. Если упор не стоит под коромыслом, то, когда коромысло попадает в выемку кулачка, оно «проваливается» и контакт замыкается, формируется, допустим, лог. 1. Если под коромыслом оказывается упор, то «провала» не происходит и контакт остается в разомкнутом состоянии и формируется лог. 0. После завершения цикла все планки сдвигаются в исходное состояние и аппарат готов принять очередной символ.

Планки в исходном состоянии

Нажата кнопка »А» — код 11 000
Вот таким нехитрым способом, без всякой электроники, формируется код МТК-2.
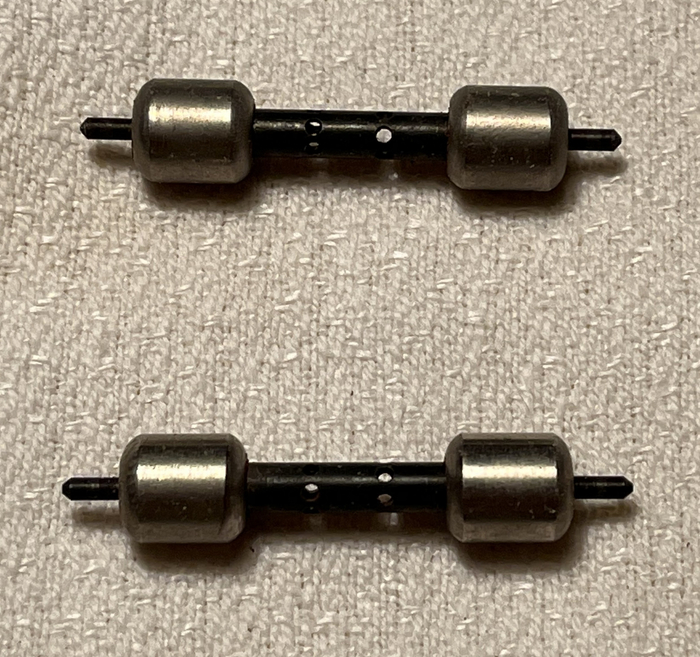
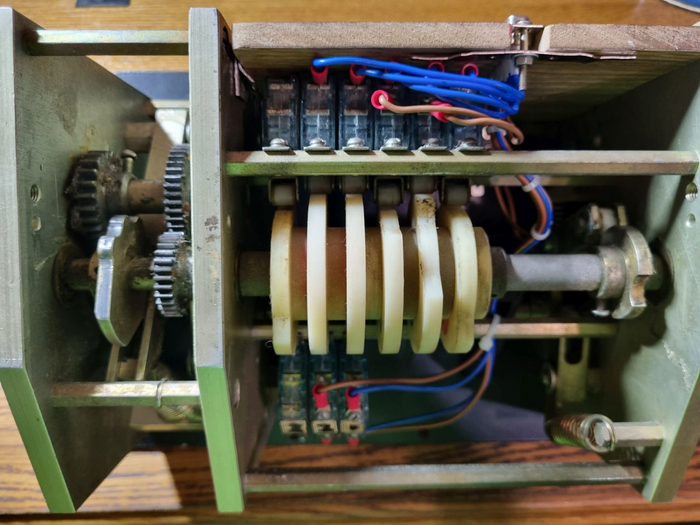
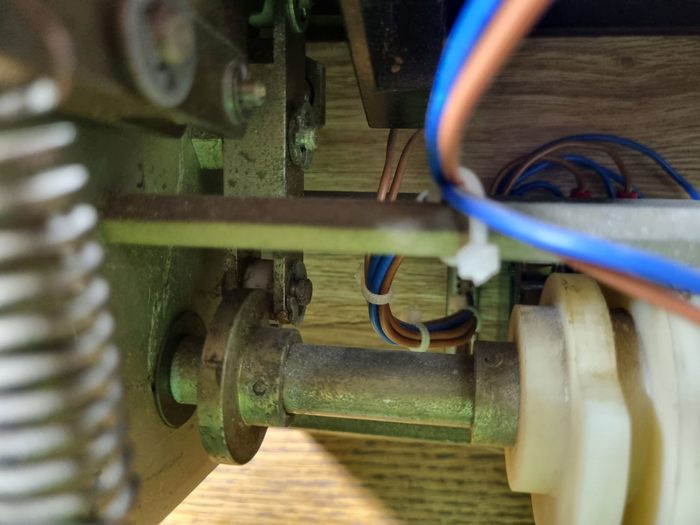
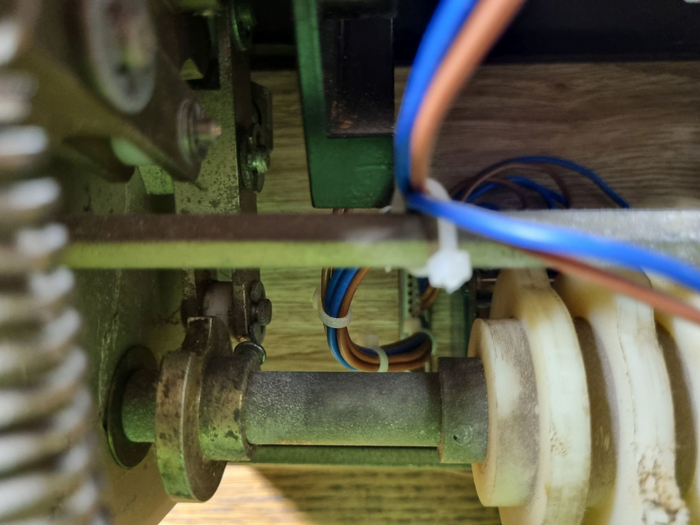
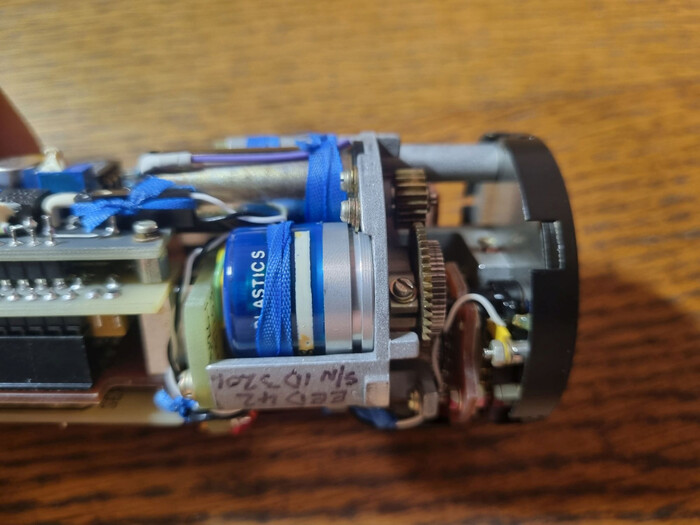
В верхней части передатчика виден барабан с металлическими шипами. Это, так называемый, комбинаторный валик.
Комбинаторный валик
Именно в нем зашифровано сообщение, которое выдает аппарат в ответ на команду «Кто там?». На нем можно закодировать порядка 20 символов. Кодирование одноразовое и производится путем отламывания ненужных шипов. Там где шип торчит, он упирается в коромысло и не дает замкнуть контакт, формируется лог. 0. Там где шип отсутствует, контакт замыкается и в линию уходит лог. 1. После того как аппарат будет починен, можно будет его запустить и прочитать это сообщение. Таким образом, можно выяснить, какой организации принадлежал ранее этот телетайп.
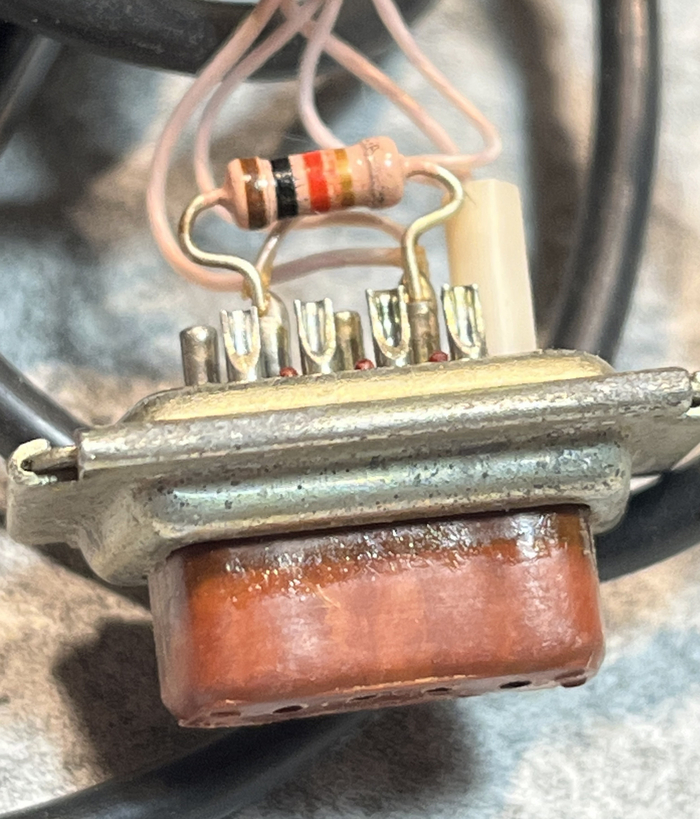
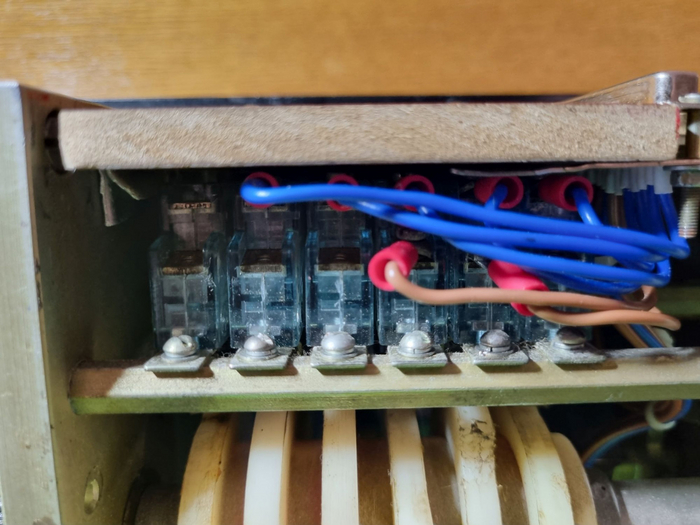
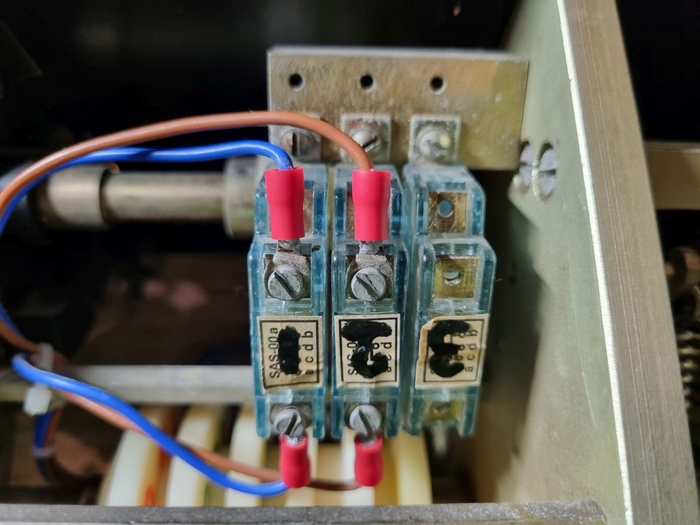
Кроме окисленных контактных площадок были обнаружены окислы между самим контактом и луженой контактной пластинкой, к которой уже припаивались провода. После того как я эти места также зачистил, контактная пара стала работать идеально. Эта операция была проделана для всех 6 контактных пар.

Разобранный контакт
Что еще очень радует в древней технике так это то, что все можно разобрать до мельчайших деталей, а затем снова собрать. Все собрано на разъемных винтовых соединениях. Я без труда открутил планку с контактами, сами контакты от планки и разобрал эти контакты на мельчайшие детали.
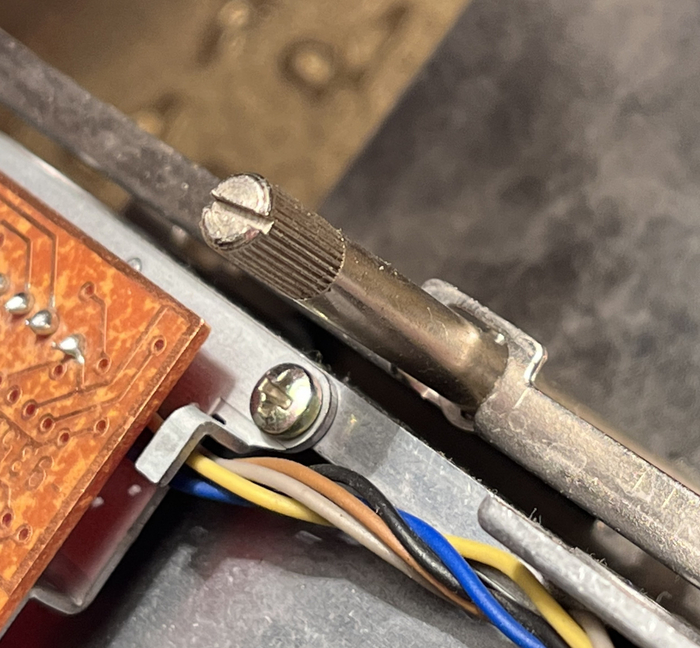
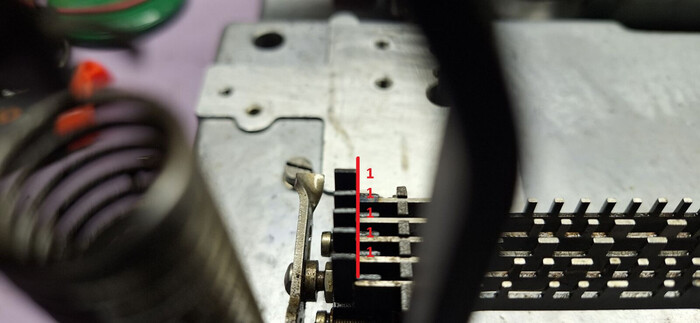
После сборки передающего узла также пришлось отрегулировать зазор между контактами у контактных пар. Для этого у каждого контакта предусмотрены 2 винта — регулировочный и стопорный. Для регулировки необходимо ослабить стопорный винт и регулировочным винтом выставить необходимый зазор. Слишком маленький зазор может приводить к ошибочной передаче лог. 1 (замкнутое состояние). Слишком большой зазор приводит к ложному появлению коротких всплесков лог. 0 между отдельными единичными битами. Зазор регулируется при передаче комбинации 11 111 (команда переключения на латинский шрифт). При регулировке можно вручную вращать ротор двигателя и визуально следить за контактами. Необходимо выставить такой зазор, чтобы при переходе передатчика от одного разряда к другому, первый контакт еще не разомкнулся, а второй уже замкнулся, чтобы было небольшое перекрытие между ними. После регулировки и проверки необходимо затянуть все фиксирующие винты.
Сам механизм передатчика был отмыт в соляре и заново смазан машинным маслом. Для этого телетайпа, кстати, есть подробнейшая инструкция по обслуживанию и настройке с указанием всех точек смазки.
Также легко извлекается и весь узел клавиатуры целиком. Для этого достаточно открутить всего четыре винта. Он также был отмыт и смазан и, кроме того, были обратно выгнуты погнутые клавиши. Этот узел достаточно простой.
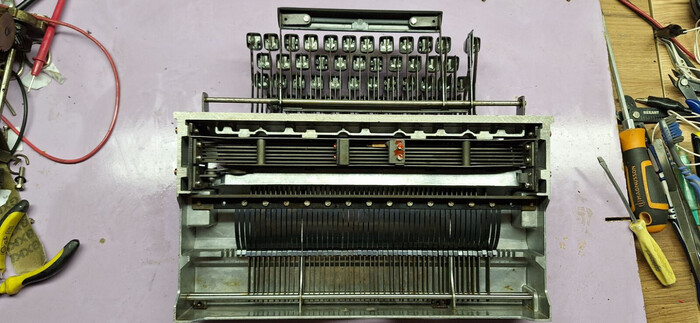
Клавиатура, вид снизу
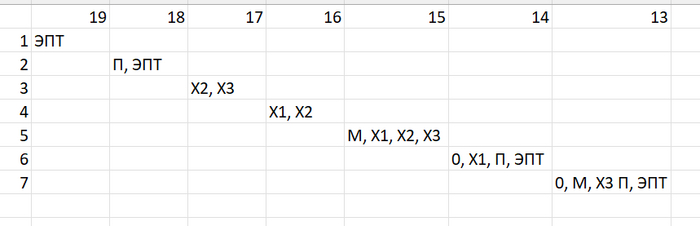
Кроме управления подвижными планками, о которых говорилось выше, в нем есть еще функция блокировки кнопок. В режимах «РУС», «ЛАТ» и «ЦИФ» соответственно высвобождаются только те клавиши, которые можно нажимать в этих режимах, остальные блокируются. Например, в режиме «ЦИФ» нажимаются только клавиши с цифрами, символами и некоторыми редко используемыми русскими буквами (которые не поместились в режиме «РУС»).

Клавиатура в сборе с передатчиком
Собрав все назад можно убедиться что узел передатчика работает! Сначала я его проверил осциллографом, подключив контакты к источнику питания через нагрузочный резистор 220 Ом. Осциллограмма для буквы А имеет следующий вид (на длительность импульсов и всей посылки пока внимание не обращать, частота вращения двигателя не соответствует номиналу):
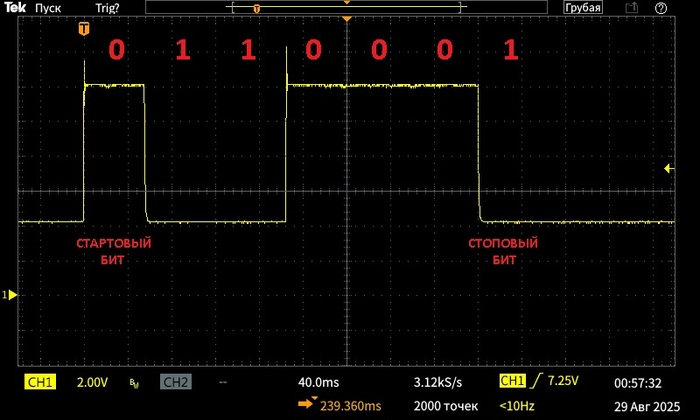
Код для буквы »А»
Осциллограмма для буквы «В»:
Код для буквы »В»
Затем я отключил нагрузочный резистор и подключил непосредственно электромагнит приемника. И приемник стал принимать посылку! В ответ на нажатие клавиш стали срабатывать те или иные печатающие ламели с литерами.
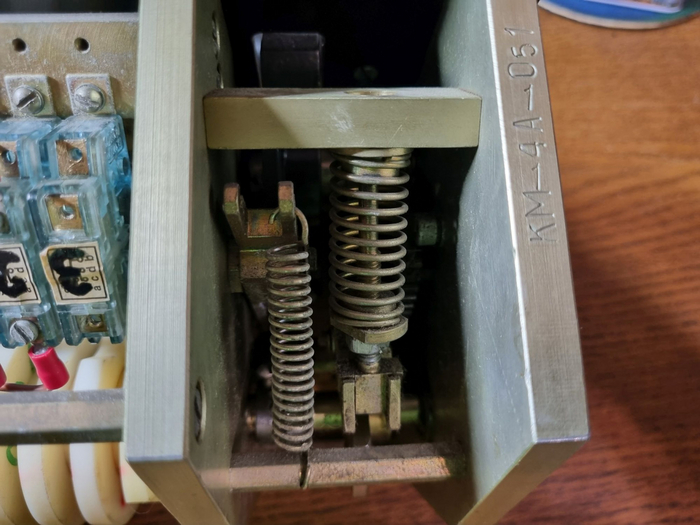
Приемник, вид спереди
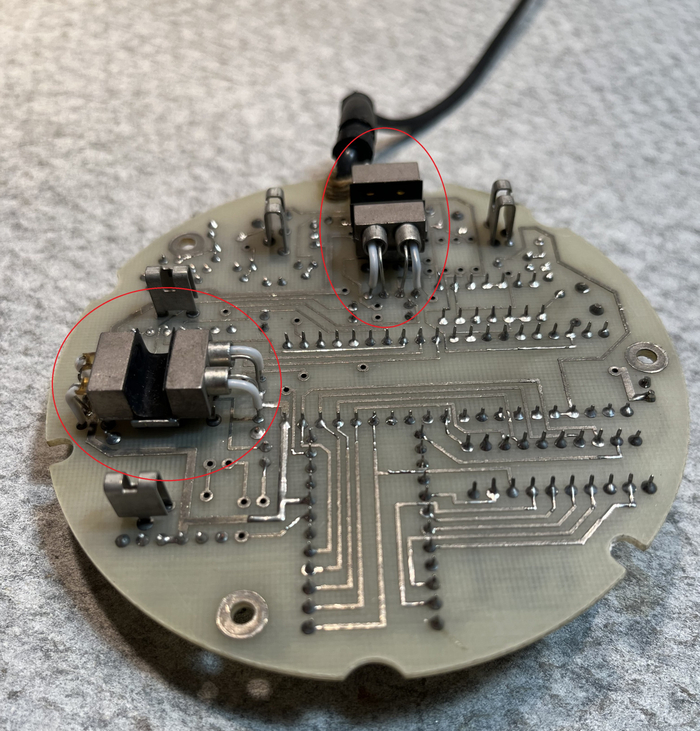
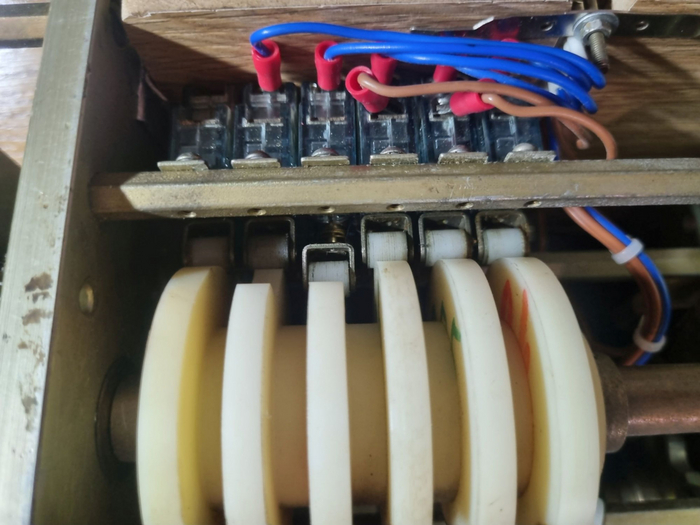
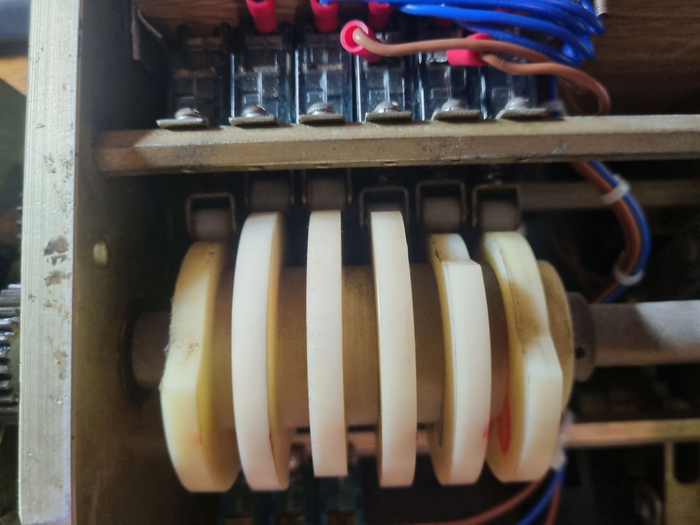
Приемник — следующий на очереди на отмывку. Если у передатчика для формирования кода Бодо было целых 5 контактов, то у приемника всего один электромагнит (на фото ниже — наверху, в центре), но зато с пятью якорями.
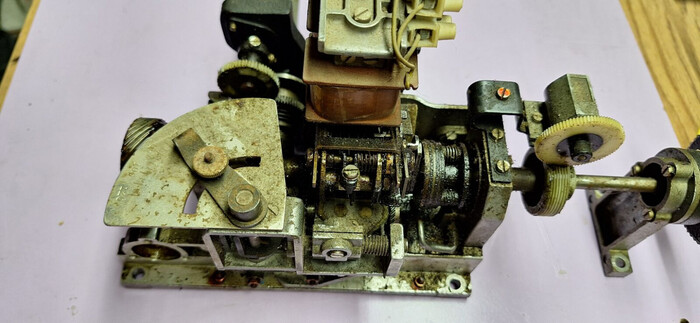
Приемник, вид сбоку
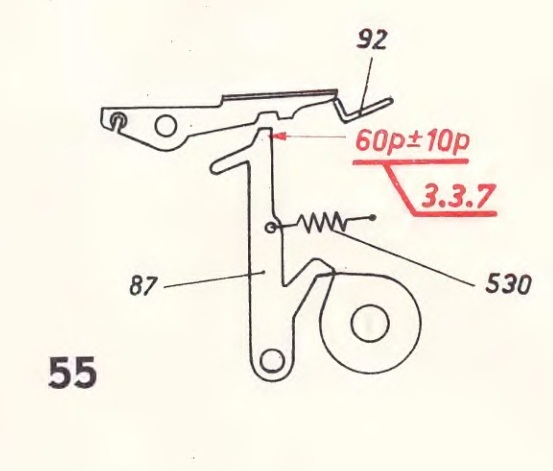
Якоря по очереди высвобождаются кулачковым механизмом.
Если в это время в катушке есть ток (передается лог. 1), то соответствующий якорь (92) остается притянутым. Если в этот момент тока нет, то он отпадает и блокирует деталь 87.
Заблокированная деталь 87 управляет тем, в какую сторону будет сдвинута одна из пяти ламелей с прорезями с помощью коромысла 1622. В результате, после приема символа все ламели также встают в одну из 32 позиций.
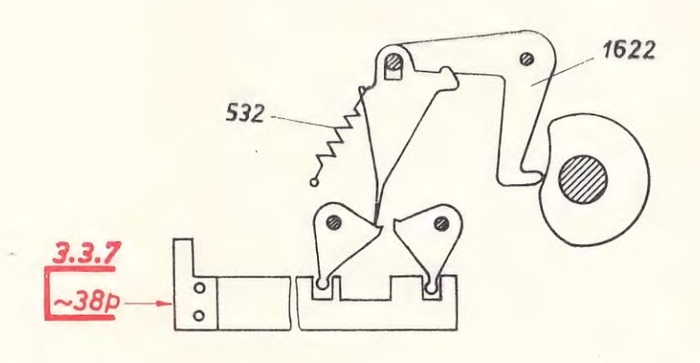
Ламели своими прорезями управляют печатающей частью, выбирая ту или иную литеру. Например, как на фото ниже.

Ламели в положении 00 000
Ламели в положении 11 111
Печатающая часть до отмывки.

Печатающая часть
Помимо управления литерами, печатающая часть еще исполняет команды «возврат каретки» и «перевод строки». Чтобы каретка с жутким грохотом не врезалась при возврате в начальную позицию, в аппарате применен пневматический тормоз. Тормоз регулируемый, управляя натяжением пружины клапана можно настроить желаемую скорость замедления. Команда «Перевод строки» просто проматывает бумагу на одну строку. Аппарат рассчитан на работу с бумагой в виде рулона. Отлично подходит обычная (не термо‑) бумага для факсов. Сбоку находится чашка звонка. Звонок раздается за 10 символов до самого крайнего положения каретки, а также при приеме буквы «Ю», она же команда «Звонок».
Также при получении команд «ЛАТ», «РУС» и «ЦИФ» происходит смещение каретки в вертикальном направлении в одну из трех позиций. В самом верхнем положении каретки печатаются латинские буквы, в самом нижнем — русские. В среднем — цифры.
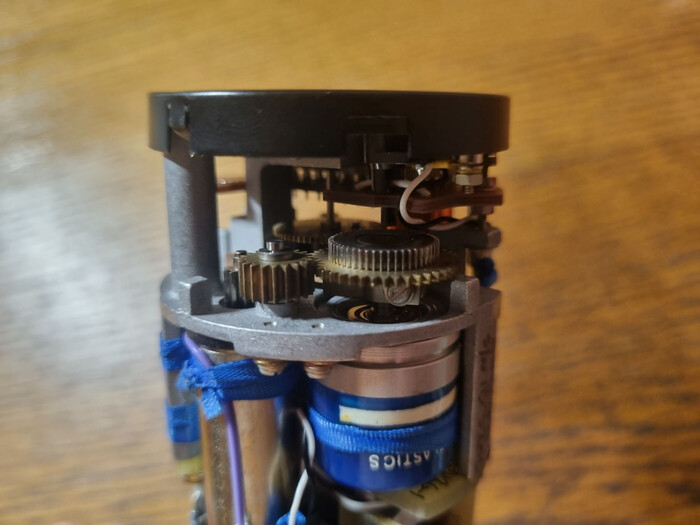
Восстановление приводного двигателя не составило проблемы. Как оказалось, там просто закисли щетки в щеткодержателях, поэтому и не было контакта с контактными кольцами. При работе коллекторный двигатель весьма громко орет, почти как стиральная машинка на отжиме. Да и размер этого двигателя, наверное, не меньше того, что стоят в стиралках. Не представляю, как операторы могли работать в таком шуме целый день. Конечно, штатный деревянный кожух немного заглушал этот шум, но все же…
Материал получился очень объемным, но весьма интересным. Всё не влезло :( Продолжение тут.
Написано при поддержке Timeweb Cloud.
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале.
Реклама ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525