На пути к идеальной сенсорной матрице для роботов
Современная робототехника и высоко интегрированные системы мониторинга требуют распределенной сенсорной архитектуры, способной одновременно регистрировать множество физических параметров. Ключевым вызовом остается создание такой системы, которая была бы энергоэффективной, многофункциональной и масштабируемой.
Традиционные подходы не могут полностью удовлетворить эти требования, поскольку базируются на активном принципе работы. Функционально-активные контактные материалы предлагают принципиально новый класс решений. Эта технология позволяет создать сенсорный массив, который обеспечивает распределённую тактильную (деформационную), температурную, электростатическую и магнитную чувствительности при полном отсутствии внешнего питания. Система сама генерирует информационный сигнал (ЭДС) за счёт энергии внешнего воздействия.
Ограничения активных сенсорных систем
Современные сенсорные системы, ориентированные на регистрацию внешних воздействий, построены по активному принципу:
Матрица дискретных сенсорных элементов (тензорезистивных, емкостных, трибоэлектрических, пьезоэлектрических , оптических и т.п.).
Обязательное энергопотребление для сканирования и считывания.
Одна матрица диагностирует только одно физическое воздействие (тепло, давление и т.п.)
Архитектура пассивной сенсорики - функционально-активный контактный материал
Функционально-активный контактный материал - это новый материал, который перестает быть пассивным компонентом и становится активным сенсором-генератором.
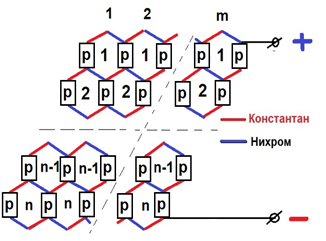
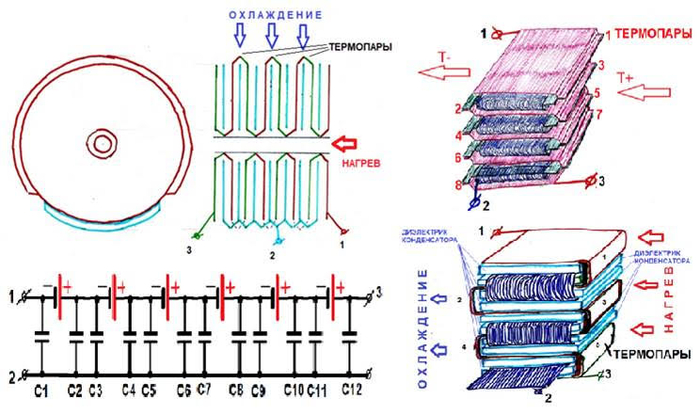
Пример простейшей реализации такого материала - проводник с последовательной знакопеременной контактной разностью потенциалов (ЗКРП-проводник). Это электрический проводник, состоящий из последовательно соединенных сегментов разнородных металлов и/или полупроводников, чередующихся таким образом, что каждый соседний контакт имеет противоположный знак контактной разности потенциалов.
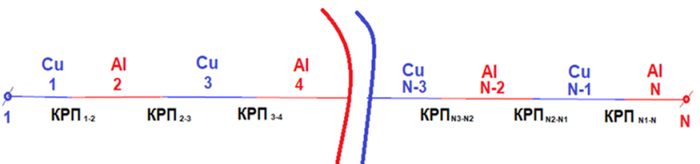
Рис. № 1. Схема ЗКРП-проводника.
Физический механизм
Классический закон Вольта говорит, что в цепи из последовательно соединённых разнородных материалов в условиях термодинамического равновесия выходное напряжение контактных разностей потенциалов не суммируется.
ЗКРП-проводник использует тот факт, что в реальных условиях полного равновесия не существует. Любое внешнее воздействие (тепло, механическая нагрузка, электрическое поле и т.п.) создает локальный градиент, выводя систему из равновесия на уровне отдельного сегмента КРП.
Микроскопические флуктуации (тепловые, механические) или внешние поля создают локальные градиенты. Эти градиенты активируют термоэлектрические, пьезоэлектрические или контактные эффекты, что приводит к генерации ЭДС (электродвижущей силы) - полезного информационного сигнала.
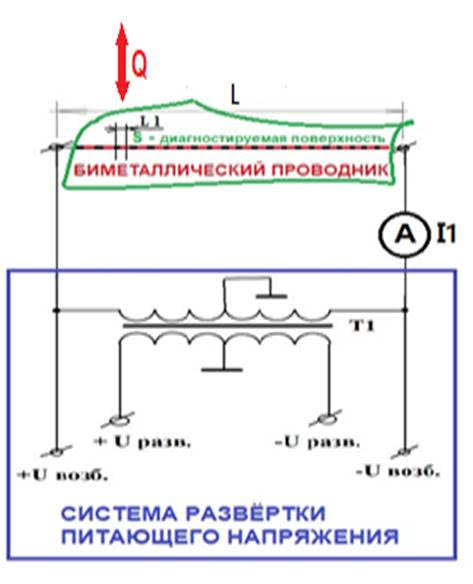
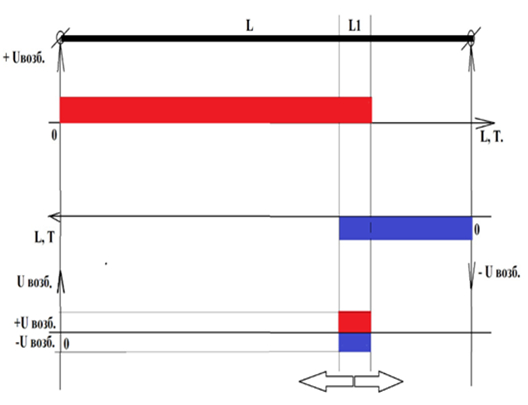
Сигнал генерируется только на тех сегментах, которые непосредственно находятся в зоне градиента внешнего воздействия. Таким образом, последовательный опрос состояния (генерируемого напряжения) каждой контактной разности потенциалов - позволяет определить место воздействия с точностью до размера одного сегмента.
Векторный анализ напряжений и классификация воздействий
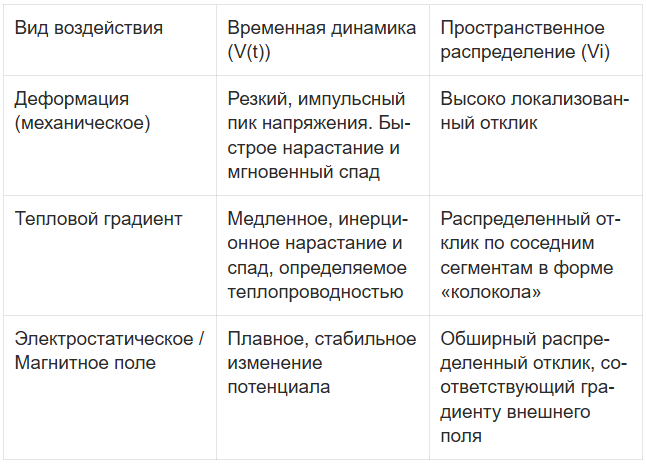
Ключевой задачей является не просто регистрация ЭДС, а разделение различных типов воздействий (тепло, деформация, поле) и точное определение их интенсивности. Решение этой задачи лежит в плоскости векторного анализа пространственно-временных сигнатур напряжений.
Система управления опрашивает состояние каждой КРП с высокой частотой, получая на выходе вектор напряжений. Разные типы воздействий формируют уникальные паттерны в этом векторе.
Пространственно-временная сигнатура
Алгоритмическая классификация
Для эффективного и точного разделения этих мульти физических факторов используется аппарат машинного обучения:
Обучение - сенсорный массив подвергается контролируемым, чистым воздействиям. Для каждого типа и интенсивности воздействия регистрируется соответствующий уникальный пространственно-временной вектор.
Классификация - ML-модель (например, CNN или SVM) анализирует форму и динамику текущего вектора, классифицируя его по типу (например, «Тепловое воздействие»).
Определение интенсивности - амплитуда пика или его интеграл, а также площадь под кривой пространственного распределения, служат регрессионными признаками. Максимальная амплитуда прямо пропорциональна интенсивности, позволяя определить точную количественную характеристику воздействия.
+++===
Таким образом, функционально-активные контактные материалы выводят концепцию сенсорных матриц на новый уровень, предлагая:
Нулевое потребление в режиме ожидания.
Регистрация деформации, температуры, электростатики и магнетизма в одном, унифицированном элементе.
Точность определения координат до размера сегмента КРП.
Эта технология открывает путь к созданию высоко интегрированных, автономных и адаптивных сенсорных систем для робототехники, индустриального мониторинга и носимой электроники.