Всегда считал что сервоприводы дорогие, но на али вдруг попался дешевый комплект серво на 750 Вт + драйвер T3D.
Решил я его взять и поменять мои шаговые двигатели на серво. Посмотрел в интернете информацию и сразу прикупил к нему EMI фильтры.
Предварительно распечатал новые проставки, т.к. посадочные отверстия не совпадали с Nema 34.
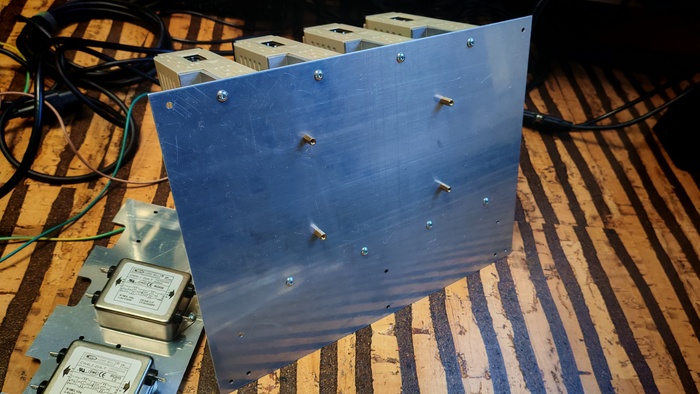
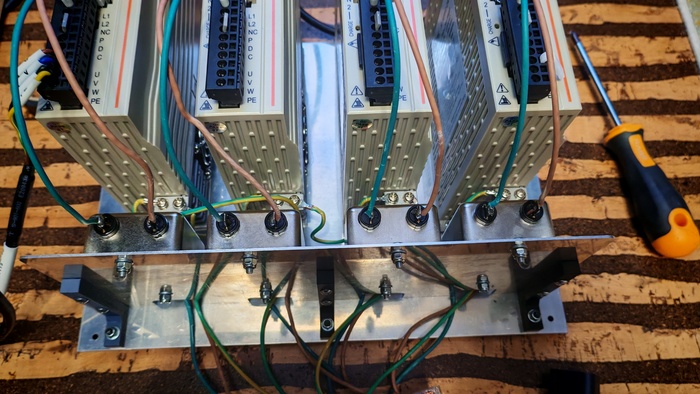
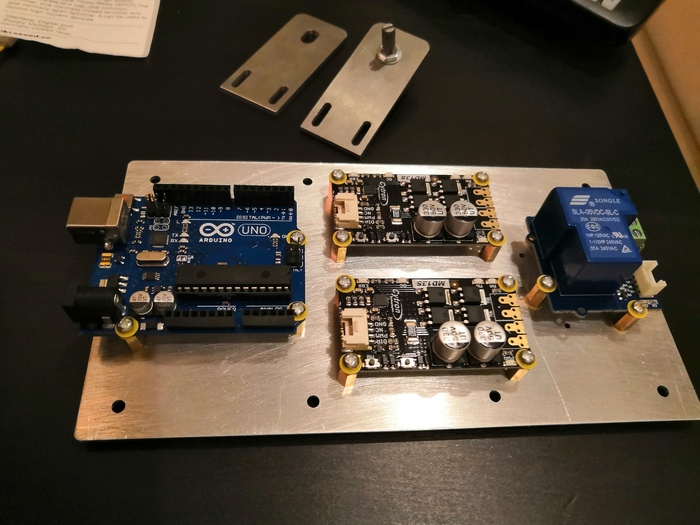
Плата управления осталась та же. Единственное, пришлось собрать некое подобие корпуса для монтажа.
1/10
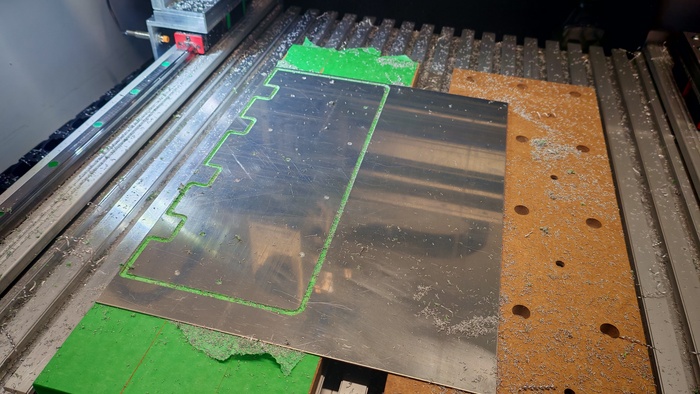
Самодельный станочек выручает.
1/4
Подпилил шпильки по длине, и пересобрал актуаторы. Смазку за одно заменил. К удивлению распечатанные на 3Д принтере детали прекрасно пережили почти год эксплуатации.
Куча проводов 😅 но тут ничего не поделаешь.
На видео процесс выхода в "дом" и ручное управление Pitch, Roll, Heave
Схему подключения пока не оформлял, не был вообще уверен что заработает.
На Ютубе выкладывал давно уже, а сюда забыл выложить. Исправляюсь.
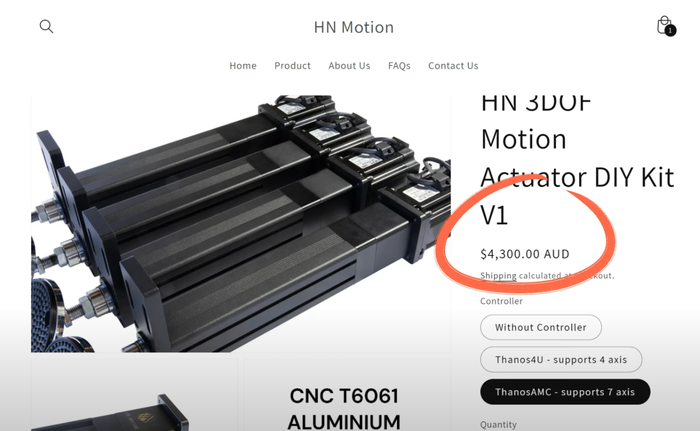
Линейный актуатор необходим мне для имитации нагрузок и наклонов во время движения на игровом автомобиле в автосимуляторах.
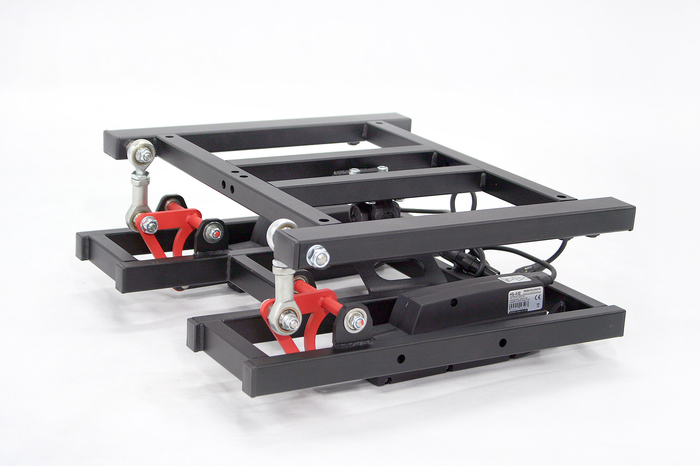
Существуют готовые системы, но стоят каких-то заоблачных денег.
В основном цена это серво мотор, механика и главное софт.
Мне удалось снизить стоимость до 85 тыс рублей приблизительно, заменив сервопривод на шаговый мотор с замкнутым контуром. Этот мотор оснащён энкодером, который позволяет определить относительное положение вала.
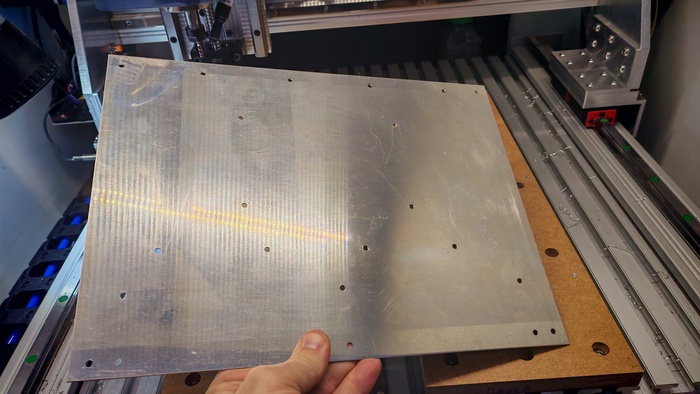
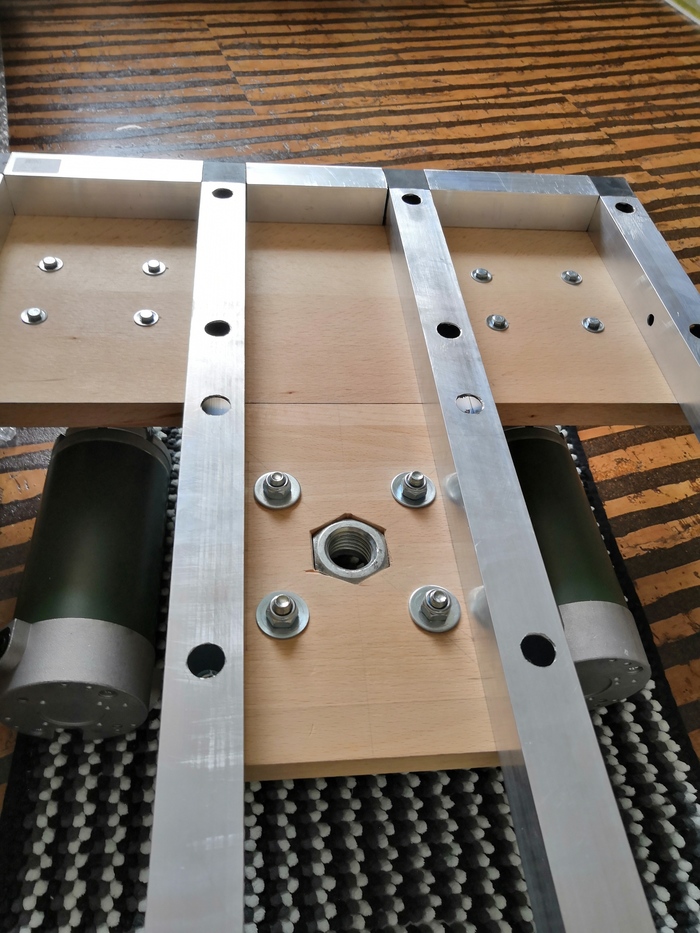
А так же корпус не из литого алюминия, а напечатанный на 3д принтере. Что-то сделал на домашнем станке с чпу (алюминиевую пластину и печатную плату)
Я серьёзно модернизировал китайский станок. В результате от оригинального станка осталась только рама. О процессе модернизации я могу рассказать в другом сообщении, если вам будет интересно.
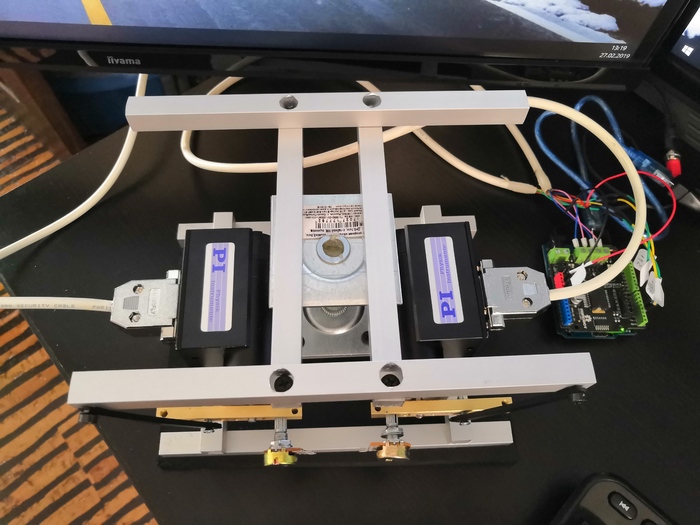
В качестве контроллера я выбрал STM32F103C8T6. Одна плата предназначена для связи с компьютером, остальные управляют положением линейного актуатора. Обмен данными между ними и главной платой осуществляется по протоколу i2c.
Прошивку писал на уровне своих знаний, вероятно можно сделать в разы лучше. Работает - не трогай 😄.
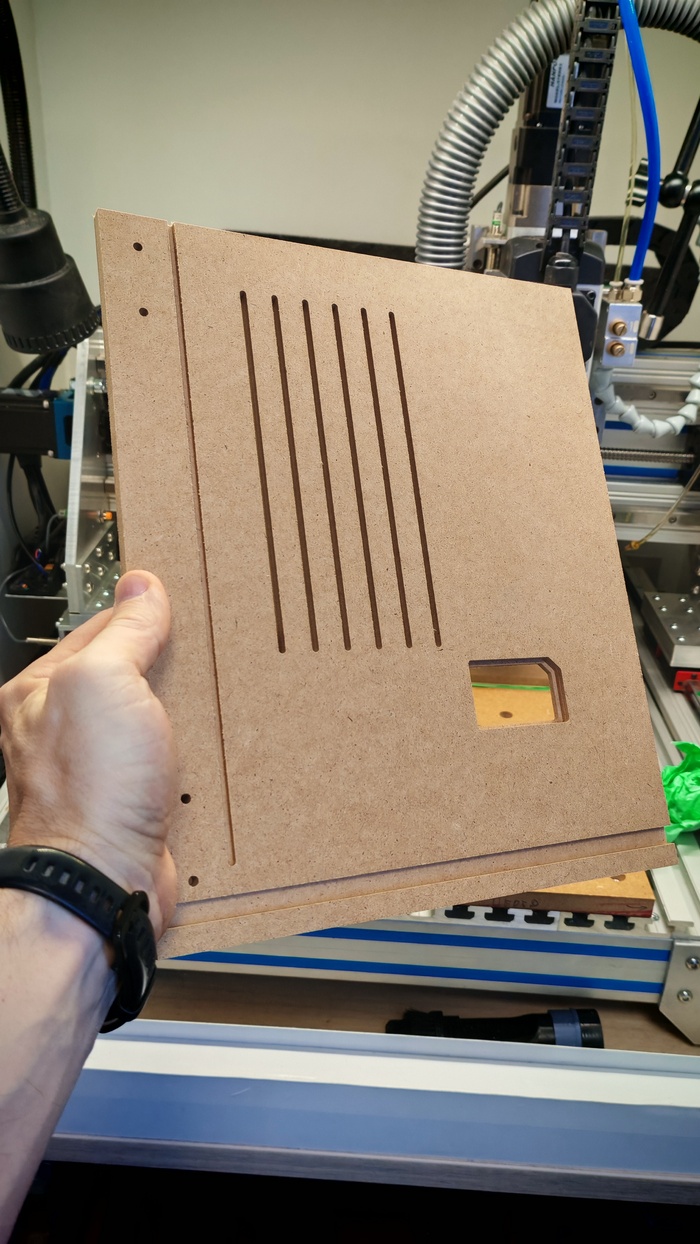
Управление мотором осуществляется при помощи драйвера HBS86H. Питание обеспечивается от источника постоянного тока напряжением 60 В. Все компоненты размещены в компактном корпусе, который изготовлен из МДФ, листов ABS и стоек, созданных с помощью 3D-принтера.
Винт имеет тип SFU 1610, то есть он совершает 10 мм хода за один оборот. Поскольку шаговые двигатели не обладают такой высокой скоростью, как сервоприводы (800-1000 оборотов в минуту против 3000 оборотов у сервоприводов), то шаг винта играет важную роль. Сначала я приобрёл винт 1605, но затем решил его заменить.
В итоге удалось добиться скорости 120 мм/с, в то время как зарубежные аналоги работают со скоростью 400 мм/с. Максимальное перемещение составляет 85 мм, тогда как у аналога этот показатель равен 60 мм.
Вот такие вот углы можно получить:
Это фотографии первой версии с тремя "ногами".
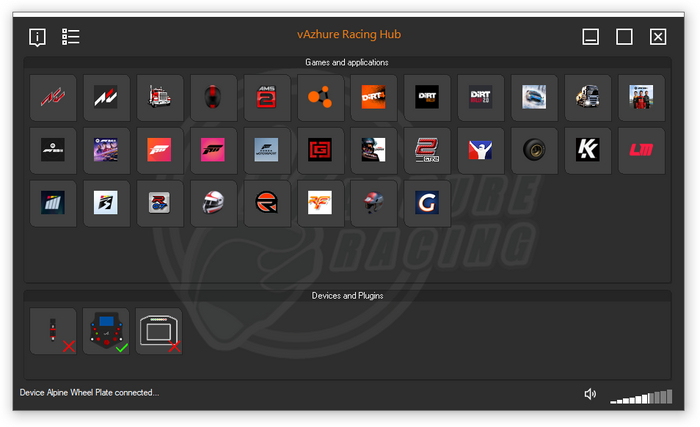
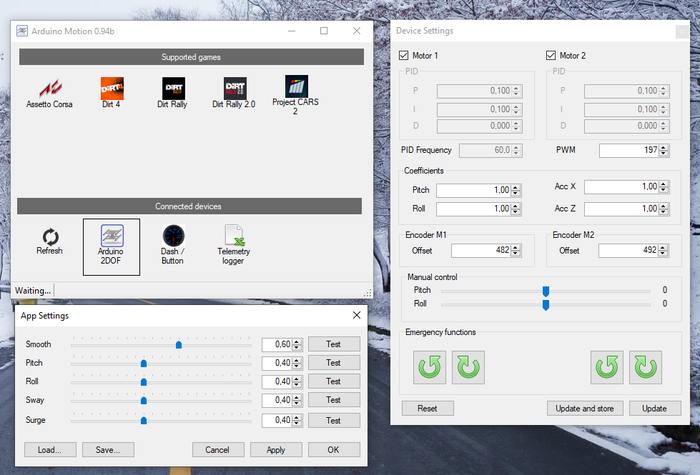
Софт собственной разработки. Написан преимущественно на C#. Интерфейс программы на английском, т.к. основная масса подписчиков на Ютубе иностранцы.
Поддерживаются практически все известные автосимуляторы:
Год выдался насыщенным в плане покупок и переделок. Мало работы, мало дохода, много расходов..
Была задумка сделать новую подвижную платформу... И я ее даже начал делать. Распечатал корпуса, заказал комплектующие с Али и даже собрал. Но, какой-то внутренний препон мешает довести дело до конца.
Привода в сборе и в разборе...
Это то что имеем на текущий момент....
Приобрёл новый 3Д принтер, но он оказался с кучей косяков... Kingroon KLP1. Как мне показалось очень прогрессивный принтер с клиппером... Но на деле очень сырой продукт...
Симпатичный кубик
Изначально пришёл с трещинами на стенках, винты вкручены без использования фиксатора резьбы. В итоге всё разболталось от высоких вибраций...
WI-Fi вечно отваливался, зажевывало и т.п.
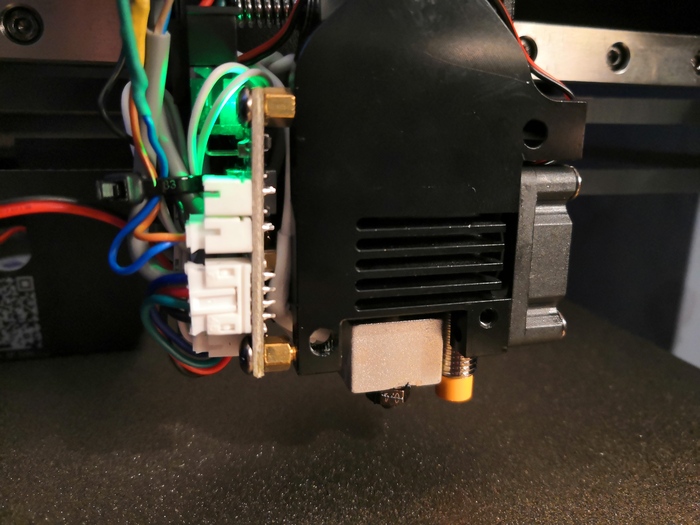
С начала умер датчик касания... Умер из-за банального перегрева...
Как видим находится он рядом с нагревательным блоком...
Тут я провел тест с феном... результат на видео.
Дальше у него накрылась материнская плата, я запросил новую и заодно новый керамический нагреватель.
Плату прислали спустя месяц, нагреватель не подошёл по диаметру, пришлось делать адаптер.
С горем пополам работает...
Следующий в очереди покупок стал лазерный гравер Sculpfun S30
Легко собрался, легко запустился, в общем никаких особых проблем.
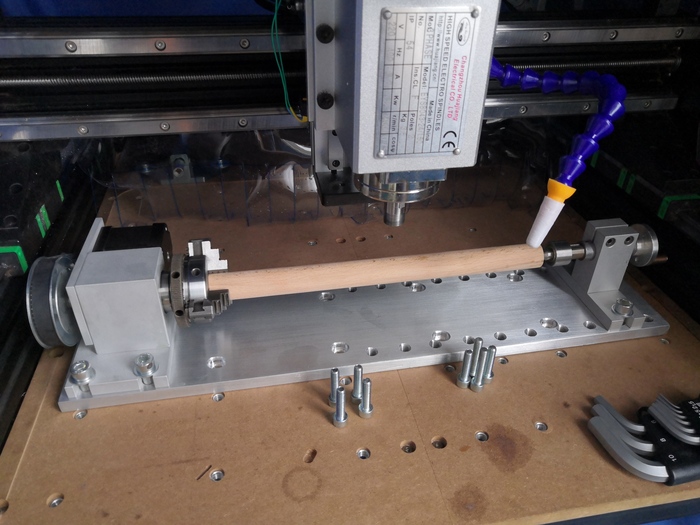
Самой желанной была покупка настольного фрезерного станочка с ЧПУ. 😋 Так как работа последние лет 20 была связанна именно со станками с ЧПУ и разработкой программного обеспечения для них.
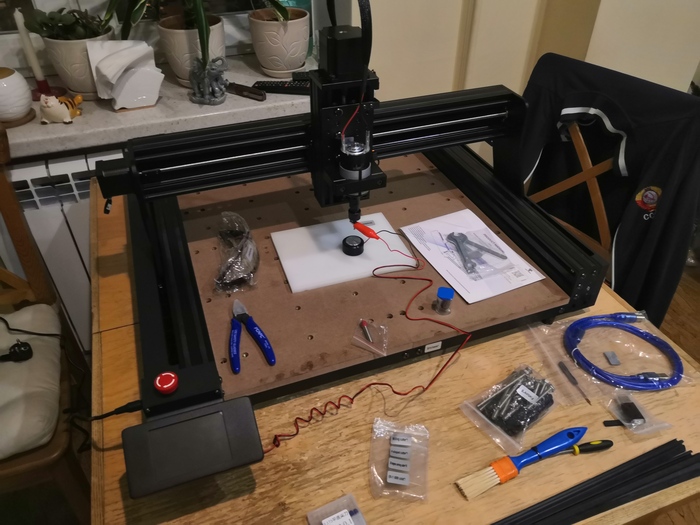
Мой выбор пал на TwoTrees TTC 450. Недорогой (39000 руб) большое поле 450x450x80 (XYZ)
Собранный станок со всеми аксессуарами
В комплекте всё необходимое для старта - инструмент, заготовка и крепеж.
Собрал, запустил, вроде работает. Позже обнаружились люфты и не закрученные винты на предварительно собранных узлах. Моторчик 775 слабоват но позволяет ковырять как в пластике так и в дереве.
Тестовый рез на текстолите
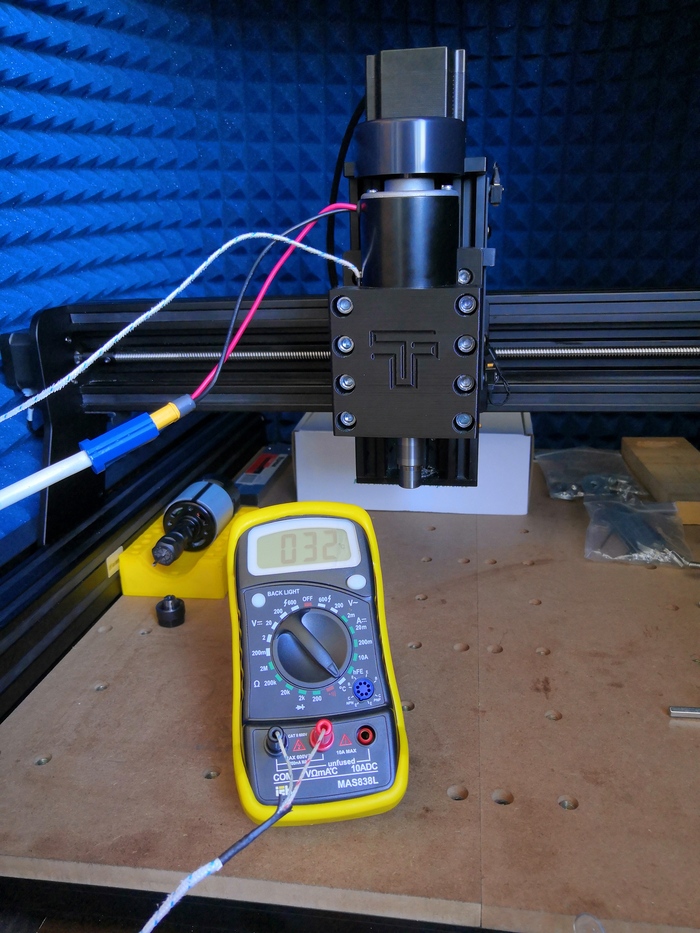
Решил что шпиндель надо помощнее
Измерил температуру шпинделя в рабочем состоянии...
Пробный рез на плинтусе из МДФ
Но тут оказалось, что из-за шумов от шпинделя начал отваливаться USB... и проявилось полное отсутствие какой либо жесткости и точности оси Z... 😭
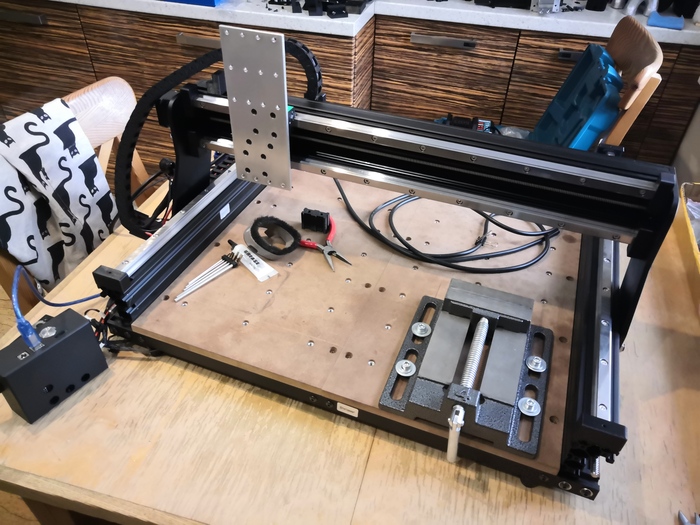
Началась модернизация... 😲
Прикрутил рельсу HGR15 и через уголок закрепил ось Z к каретке. Стало гораздо лучше. Но всё же не устраивала волнистость по оси Y и люфт оси Z...
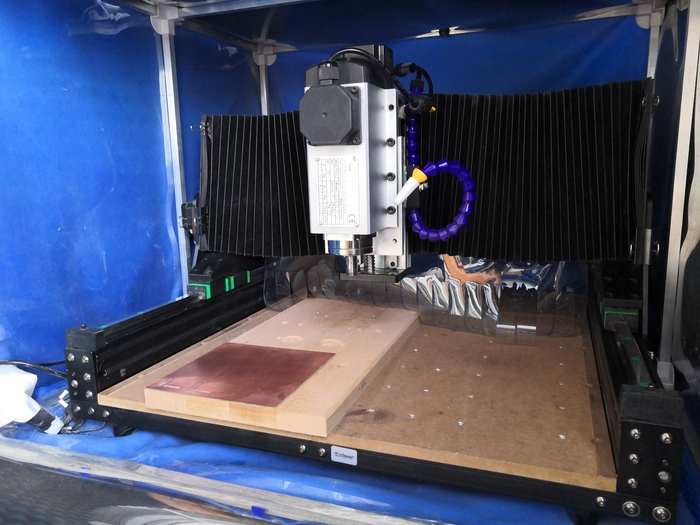
Покупаю новый шпиндель, еще рельсы и каретки. Рисую модель в Компасе...
Гармошка провисает, пока не придумал как исправить...
Всех фото не уместить... На очереди еще лежит поворотная ось и новая плата GRBL
Купил электромонтажную алюминиевую шину, так оказалось дешевле...
К станку также сделал пульт для привязки к заготовке
Корпус распечатал на 3д принтере, контроллер Arduino Pro Micro, галетный переключатель, кнопки и энкодер
Планы на следующий 2024 год:
- доделать и запустить подвижную платформу; - подключить четвертую ось и освоить создание программ для неё; - найти интересную высокооплачиваемую работу 🤔 ( или буду просто жить на минималках 😹); - больше читать книг; - разучить интересные рифы на электрогитаре; - хорошо высыпаться 🥱
Давненько не публиковал посты на Pikabu, так что сильно не пинайте.. Чукча не писатель - чукча дилетант самоучка..
Я занимаюсь гонками в автосимуляторах уже с 2018 года кажется.. Но больше всего меня заинтересовала возможность делать физические устройства на базе Ардуино.
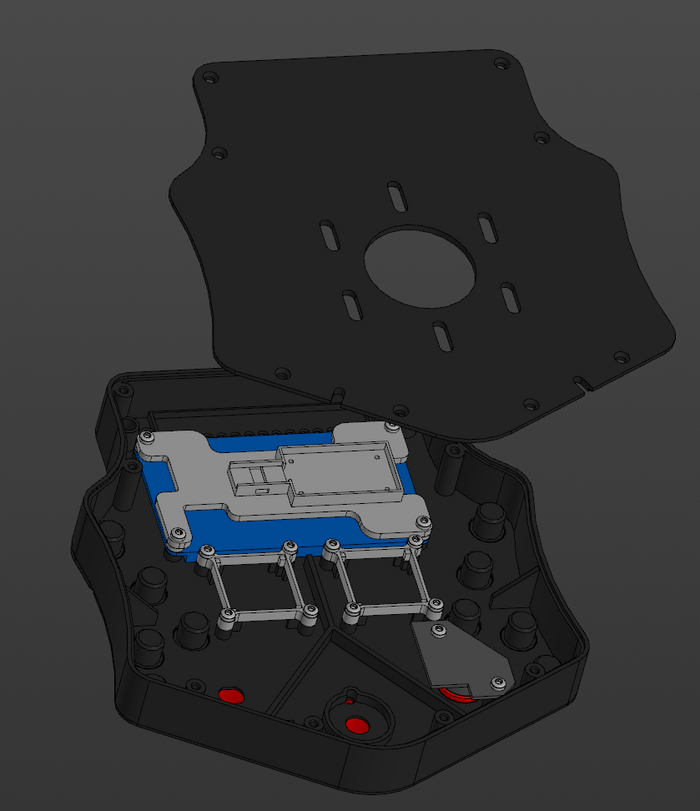
На этот раз я решил воплотить в жизнь накладку руля Renault Alpine.
3Д модель я создавал в Компас 3Д. Уж больно я к нему привык. Пользуюсь им еще с начала 2000-х.
Мой вариант отличается от оригинального, но тут диктуют правила доступные мне компоненты. И дисплей и шаг светодиодов... и прочее.
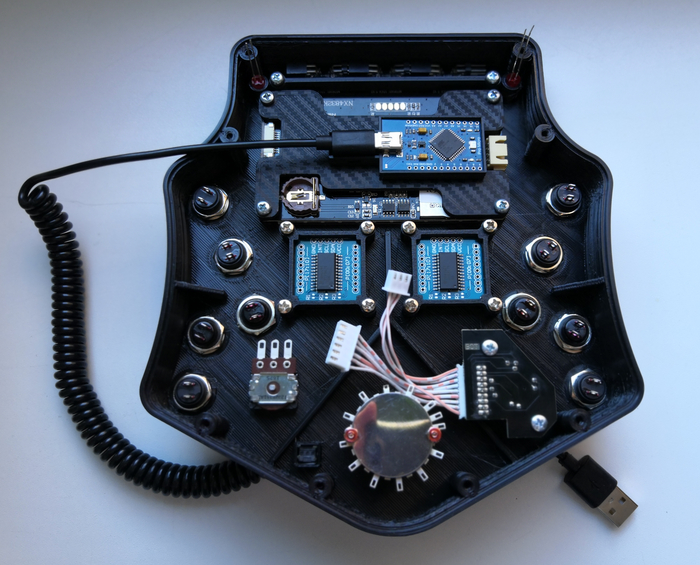
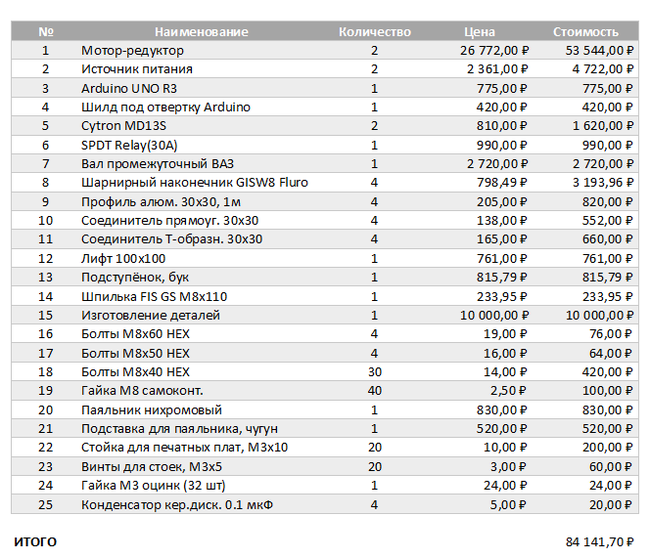
Собственно вот список компонентов:
- Руль OMP 335 мм в диаметре без вылета (китайская копия) 1 шт
- Arduino Pro Micro 1 шт.
- Дисплей Nextion Enhanced 3,5” / 480×320 1 шт
- Расширитель портов (I/O Expander) PCF8575 2 шт
- Энкодер 288T232R161A2 1 шт
- Funky Switch RKJXT1F42001 1 шт
- Галетный переключатель на 12 позиций 1 шт
- Линейка светодиодов (3 шт x 5 RGBW светодиодов)
- Красный светодиод 2 шт
- Кнопки PBS-33В разных цветов 10 шт
- Тактовая кнопка KLS7-TS6601-13.0-180 1 шт
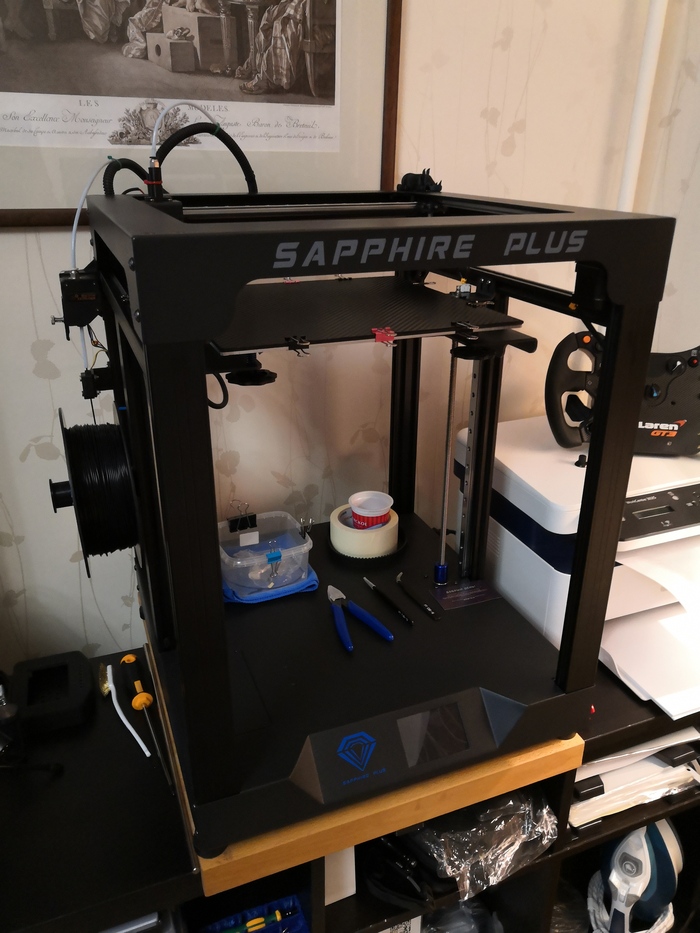
Печать корпуса осуществлялась на 3д принтере Sapphire Plus.
Принтер был немного мною доработан: заменены вентиляторы, поставлен регулятор напряжения, доработано крепление трубки подачи филамента и пр...
С помощью автомобильной пленки наклеенной на стол 3Д принтера добился печати карбона 😄. Так что не надо обклеивать детали пленкой, а сруза получать готовую текстуру.
На фото выше видны шаги по улучшению дизайна.
А так выглядят внутренности перед распайкой проводов.
На видео выше общий вид руля и немного игры карбона.
А здесь уже руль в работе на примере автосимулятора Assetto Corsa Competizione.
Самое сложное было добиться отзывчивости кнопок и не потерять в скорости обновления информации на дисплее.
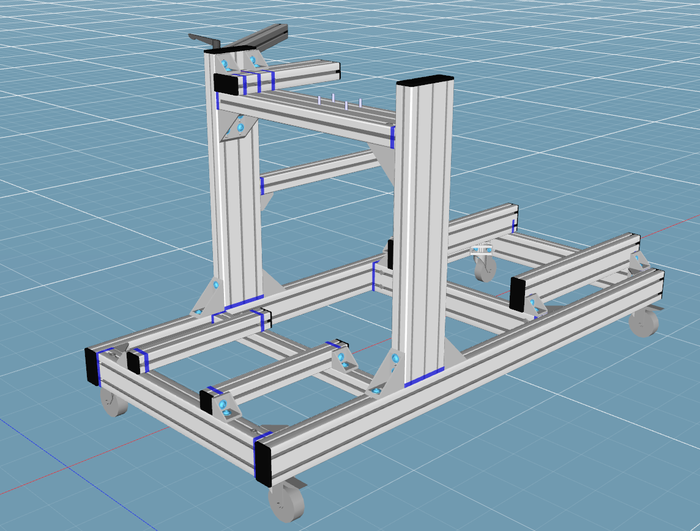
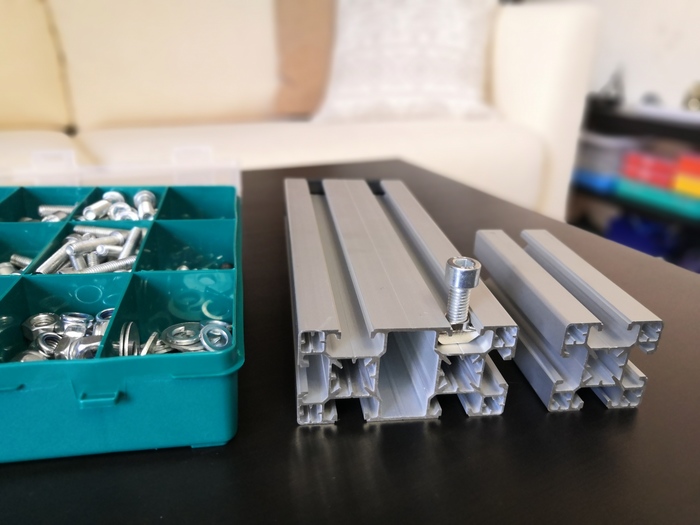
Новая стойка выполнена из конструкционного алюминиевого профиля размером 40x40, 40x80 и 40x120 миллиметров.
Виновник торжества
Проект стойки выполнен в программе May-CAD по моим размерам (чтобы помещалась в отведённом ей парко-месте)
Найти ссылку на скачивание не составит труда, кому надо тот найдёт.
Ниже видео процесса проектирования:
У данной стойки имеются следующие минусы: отсутствие возможности изменения угла наклона педалей и сидения. Но меня пока устраивает...
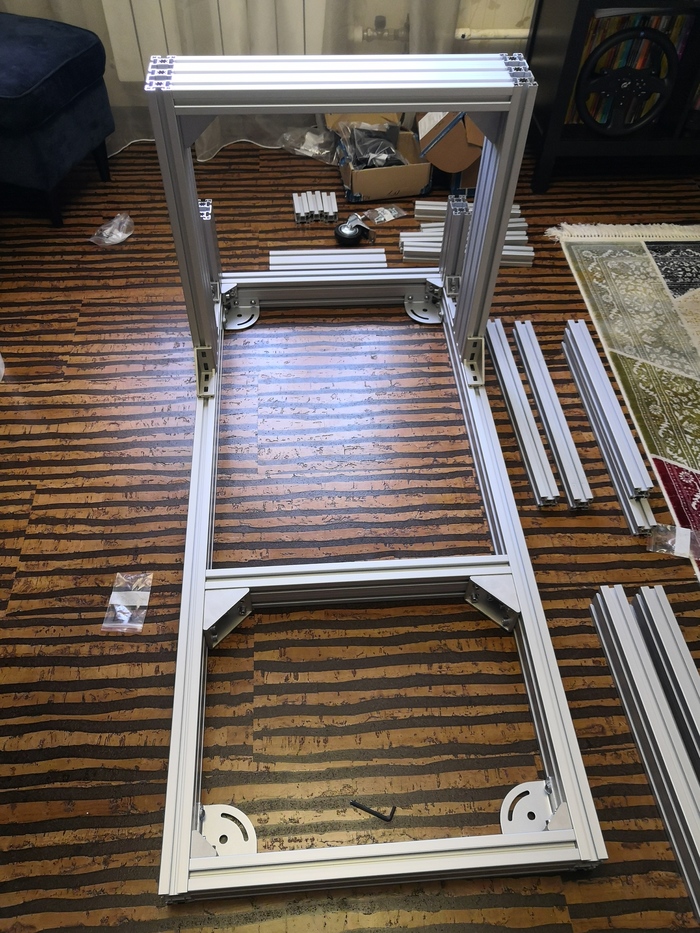
Процесс сборки не сохранился, сделал только несколько фотографий
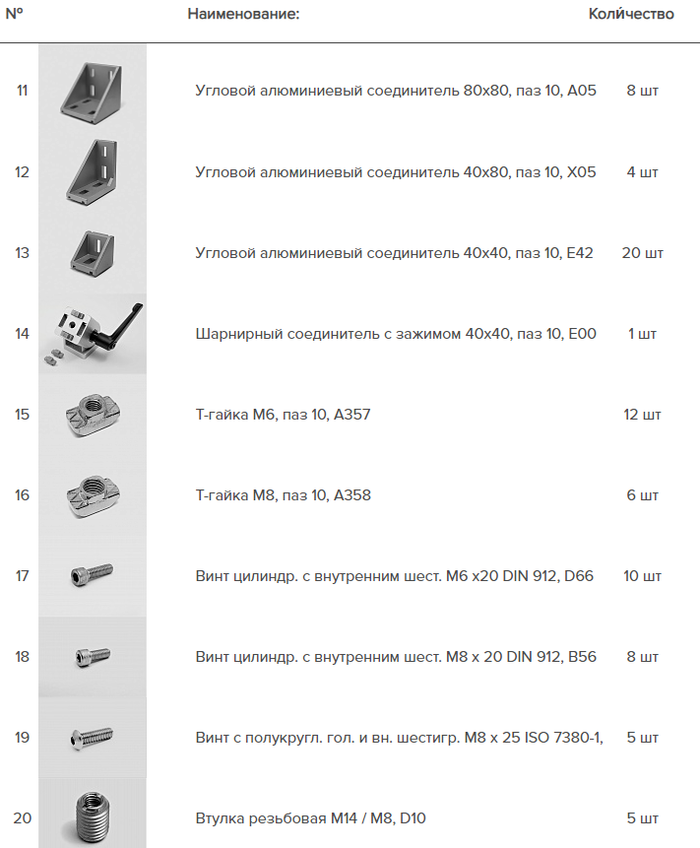
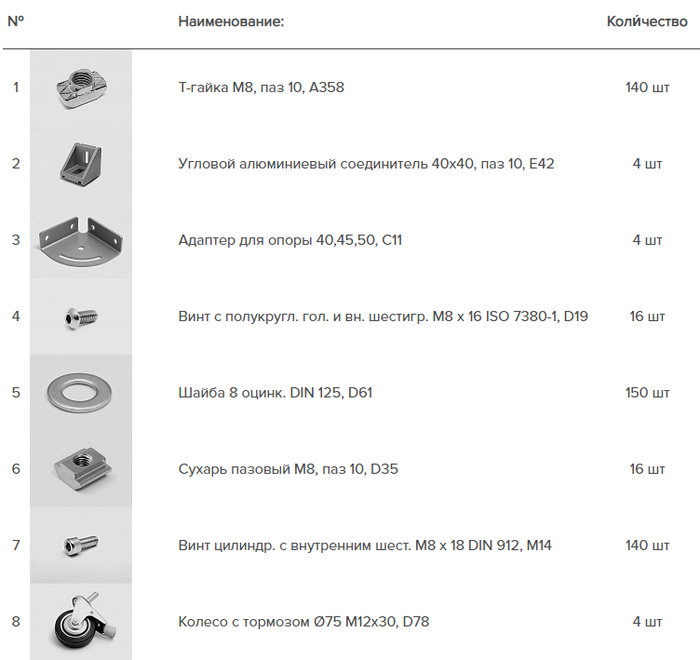
Закупал материалы на "Соберизаводе" там же осуществлялась резка
Так как заказывал первый раз, то кое-какие крепежи купил с большим запасом (осталось дофига). Но в процессе есть возможность что-то нарастить. Планирую выделить пространство и поставить мониторы стационарно на стойку из того-же профиля.
Результат сборки можно увидеть на следующий фотографиях
Результатом очень доволен, особенно колёсиками, т.к. гонки совмещаются с работой на одном и том-же рабочем месте.
Ссылка на ПО и проект стойки в описании под видео.
Многие писали про реалистичность.. Вот, у меня руки зачесались.
Решил сделать платформу под кресло. Нашёл множество прототипов вроде этого:
Прикупил обучающий набор Arduino и понеслось. Экспресс курс и спустя полторы недели имеем вот это чудо.
Оно даже шевелится и работает.
Но....
Это всего лишь модель, вдвое меньше нужного. Держит только вес книги.
Надо подобрать мотор-редукторы (как советуют - червячного типа). Известно разве что это: частота вращения на выходе - 50 об/мин, рабочий цикл ~100%, питание 12-24В.
Вес конструкции с водителем 100-120 кг (на центральной опоре).
Пока разбираюсь с играми (телеметрия, Shared memory, UTP) и, параллельно, с ардуино. Благо язык знакомый. Но, есть нюансы. Контроллерами ранее не занимался, а тут надо быстродействие. Планирую заняться телеметрией.
Софт импортный есть, но у меня желание разобраться самому (тыжпрограммист).
Собственно обращение к пикабушникам - нужен совет по подбору момента (мощности) мотор-редуктора. Может кто уже сталкивался.
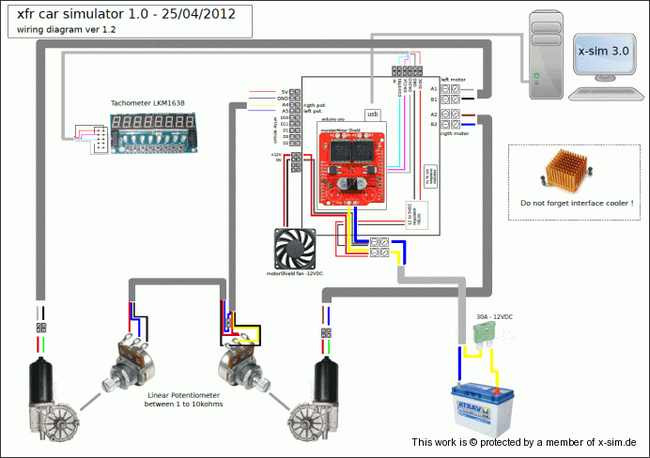
В плане электроники, то вот схема с зарубежных ресурсов:
На зарубежных сайтах типа xsimulator много всего, но матчасть отсутствует... На этом всё...