


Вышел новый трейлер фильма "Вызов"
Выход в прокат 20 апреля 2023.
Выход в прокат 20 апреля 2023.
Японское ракетчики извинились за аварию ракеты H3

Сегодня утром японское космическое агентство JAXA предприняло попытку испытательного пуска своей новой ракеты H3. Поначалу всё проходило хорошо: твердотопливные боковые ускорители успешно отработали и отделились, кислородно-водородный двигатель первой ступени (центрального блока) также выполнил свою задачу, головной обтекатель отделился, однако маршевый двигатель второй ступени не смог включиться, и ЦУП отдал команду на самоуничтожение блока верхней ступени и полезной нагрузки. Остатки ракеты упали в океан неподалёку от Филиппин, и никто не пострадал. Запускаемый спутник для съемки и изучения поверхности Земли DAICHI-3 (ALOS-3), потерян.
Ракета среднего класса H3 должна стать основной ракетой Японии на ближайшее десятилетие. Она оснащается двумя или четырьмя твердотопливными боковыми ускорителями и кислородно-водородными двигателями первой и второй ступени.

В 4:37 мск с космодрома Танэгасима в префектуре Кагосима на юго-западе страны JAXA осуществило запуск новой тяжелой японской ракеты H3.
17 февраля пуск этой ракеты уже был прерван из-за не срабатывания боковых ускорителей.
Сейчас в полете не сработала вторая ступень. Пришлось выдать команду на подрыв.
Носитель должен был вывести на орбиту разработанный японской корпорацией Mitsubishi Electric спутник (не макет) дистанционного зондирования Земли с разрешением камеры до 80 см.
Ракету разрабатывали с 2013 года. Ее первый пуск планировался на 2020 год.
Для создания некоторых деталей новой ракеты-носителя использовались 3D-принтеры.
Источник: канал Закрытый космос
Полная трансляция:
Полный и подробный обзор китайского лунного посадочного модуля от одного из лучших специалистов по китайской космонавтике - Игоря Лисова, журналиста, переводчика и автора книги «Разведчики внешних планет: путешествие "Пионеров" и "Вояджеров" от Земли до Нептуна и далее».
Программа пилотируемых исследований Луны в Китае формально еще не утверждена, однако говорят о ней все больше и охотнее. Более того: на выставке, посвященной 30-летию «проекта 921», уже представлены макеты основного носителя лунной программы и двух кораблей: орбитального и посадочного.
Экспозиция, которая открылась 24 февраля 2023 г. в Западном зале Национального музея Китая, заявлена как «выставка достижений», но по факту посвящена истории, настоящему и перспективам пилотируемой космонавтики.

Как известно, программа пилотируемой космонавтики Китая была утверждена 21 сентября 1992 г. (отсюда ее условный номер 921) и включала три этапа: создание пилотируемого корабля «Шэньчжоу», освоение техники встречи и стыковки на орбите и работ в открытом космосе, строительство национальной космической станции «Тяньгун». Их реализацию иллюстрируют такие экспонаты пекинской выставки, как полномасштабный макет Базового блока «Тяньхэ», летный спускаемый аппарат корабля «Шэньчжоу-13» и макеты в масштабе 1:4 станции в целом, автономного космического телескопа «Сюньтянь» и используемых в программе носителей CZ-2F, CZ-7 и CZ-5B.
В настоящее время заявленная в 1992 году программа выполнена в полном объеме: станция «Тяньгун» собрана и вступает в стадию постоянной эксплуатации и использования в интересах науки и народного хозяйства. Самое время приступить к реализации следующего этапа программы; соответствующее решение ожидается в текущем 2023 г.
Мы уже описывали баллистическую схему лунной экспедиции (https://novosti-kosmonavtiki.ru/articles/76035.html), проектный облик предлагаемых носителей сверхтяжелого класса (https://novosti-kosmonavtiki.ru/articles/85103.html) и рассказывали о ходе испытаний двигателей для них (https://novosti-kosmonavtiki.ru/articles/85609.html).

Стоит напомнить, что сценарий пилотируемого полета на Луну основан на двухпусковой схеме с использованием носителя грузоподъемностью 70 т на низкую околоземную орбиту (как у американской ракеты SLS этапа Block I) или 27 т на траекторию полета к Луне. Первым стартует лунный модуль вместе с тормозной ступенью, которая используется для выхода на окололунную орбиту. Если все проходит успешно, на второй ракете запускают пилотируемый корабль нового поколения с экипажем из трех космонавтов. После встречи и стыковки на окололунной орбите весь комплекс снижается на предпосадочную орбиту. Двое членов экипажа переходят в лунный модуль, и он отстыковывается. Основную часть торможения осуществляет тормозная ступень, затем она отделяется и падает на Луну, а лунный модуль завершает процесс прилунения. После выполнения программы работ на поверхности лунный модуль стартует и стыкуется на орбите с основным кораблем. После обратного перехода экипажа выполняется сход с окололунной орбиты и полет к Земле. Командный модуль корабля отделяется перед входом в атмосферу и приземляется или приводняется и может использоваться повторно.

Макет лунного взлетно-посадочного аппарата на выставке в Национальном музее был представлен впервые, а макет пилотируемого корабля продемонстрировал отличия от предыдущего проектного варианта.
Лунные модули всех стран и народов похожи друг на друга, но лишь на первый взгляд. Китайский лунный посадочный аппарат (月面着陆器, yue mian zhuoluqi, юэ мянь чжолуци) по размерам сходен с американским, а вот по концепции повторяет советский 11Ф94. Он одноступенчатый, то есть садится на Луну и стартует с нее с использованием одних и тех же двигателей. Главное же отличие от всех предшественников – двигательная установка, которая включает не один маршевый ЖРД, а четыре двигателя YF-36 номинальной тягой 7500 Н с управляемым вектором тяги и глубоким дросселированием на монометилгидразине и смеси окислов азота MON3. Двигатели располагаются по периферии лунного модуля на значительной высоте относительно четырех посадочных опор, что с одной стороны позволяет не опасаться зарывания сопла в лунный грунт, но с другой – предъявляет весьма высокие требования не только к надежности двигателя, но и к работе системы управления. В случае отказа одного из двигателей она должна уметь немедленно выключить противолежащий и форсировать тягу, чтобы избежать потери ориентации и неконтролируемого падения на Луну.
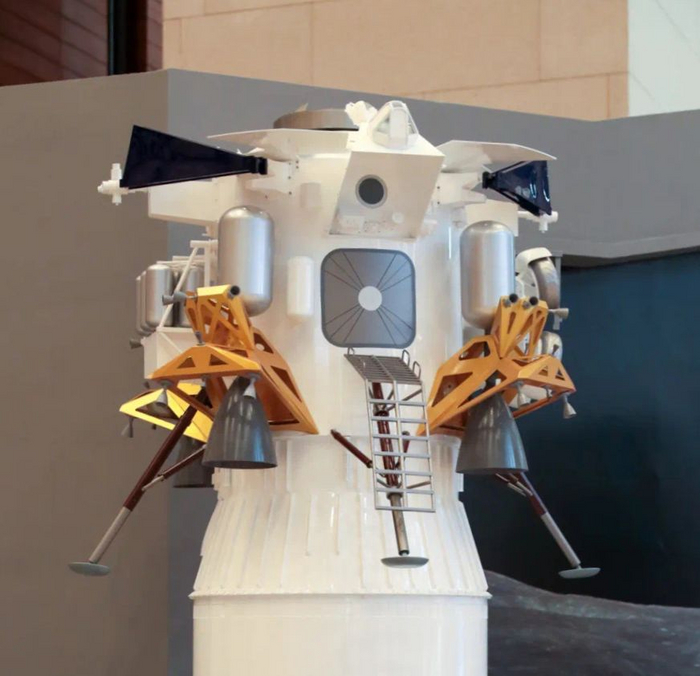
Помимо четырех маршевых двигателей, наблюдатели насчитали на макете китайского лунного модуля по крайней мере 28 ЖРД малой тяги для ориентации, разворотов относительно центра тяжести и направленного перемещения. В это число, по оценке, входят:
Восемь ЖРД тягой 250 Н и четыре тягой 25 Н для перемещения вперед;
Четыре ЖРД тягой 25 Н для перемещения назад;
Четыре ЖРД тягой по 250 Н для разворотов по крену;
Четыре ЖРД тягой по 250 Н для разворотов по тангажу;
Четыре ЖРД тягой по 250 Н для разворотов по рысканью.

Источником электропитания лунного модуля являются две разворачиваемые солнечные батареи на гибких фотоэлементах типа Ultraflex. Шасси аппарата имеет четыре телескопические опоры. Выход из кабины на поверхность Луны осуществляется через передний люк квадратного сечения с использованием лестницы. На Луне космонавты будут использовать четырехколесный луноход, доставляемый в сложенном виде на боковой поверхности взлетно-посадочного аппарата. На верхней плоскости находится стыковочный агрегат с люком для перехода в командный модуль.
Тормозная ступень использует новый двигатель тягой 8 тс на высококипящих компонентах топлива. Это один из девяти ЖРД, создаваемых 6-й академией корпорации CASC в рамках программы «девять двигателей за восемь лет».

Пилотируемый корабль нового поколения (新一代载人飞船, xinyidai zairen feichuan, синьидай цзайжэнь фэйчуань) массой до 25 т состоит из конического командного модуля и цилиндрического служебного отсека и запитывается от двух «крыльев» солнечных батарей. Корабль может нести экипаж от 4 до 7 человек, но к Луне полетят только трое.
По сравнению с экспериментальным изделием, испытанным 5 мая 2020 г. в первом пуске ракеты CZ-5B, диаметр командного модуля увеличен с 4.5 м до 5.0 м. На служебном модуле установлены четыре двигателя YF-36, обеспечивающие в режиме полной тяги ускорение 0.12 g. Кроме того, имеется 32 ЖРД ориентации и стабилизации.
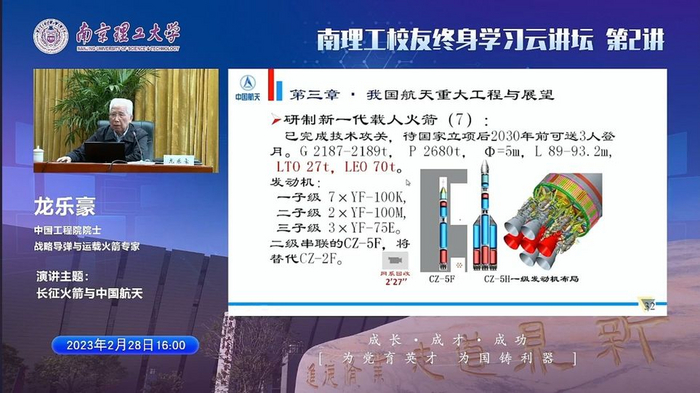
Лунный носитель ранее был известен под условными обозначениями «ракета 921», CZ-5DY и CZ-5G, а у нас проходил под неформальным наименованием «полусверхтяж». На пекинской выставке он представлен под новым и, вероятно, окончательным именем «Чанчжэн-10» (长征十号, Changzheng 10, CZ-10). Главным конструктором ракеты является Чжан Чжи (张智). Облик и характеристики носителя заметных изменений не претерпели: три единых блока первой ступени с 27 двигателями, стартовая масса 2187 т, стартовая тяга 2678 тс, тяговооруженность 1.22, высота 88.5 м. Первый старт CZ-10 намечается на 2027 г., хотя формально проект еще не утвержден к реализации.
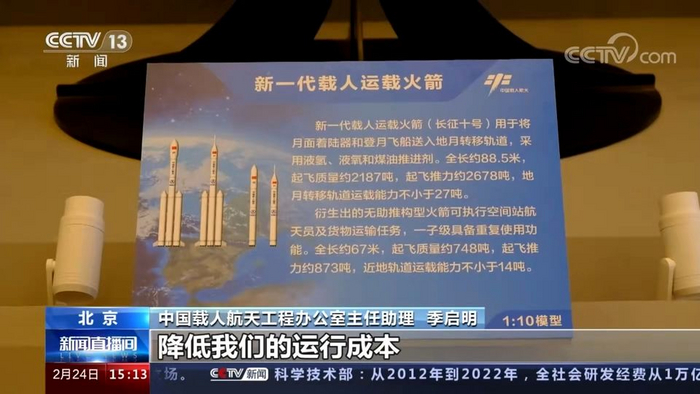
Вариант CZ-10 без боковых блоков предназначен для запуска нового корабля на низкую околоземную орбиту. Носитель высотой около 67 м имеет стартовую массу 748 т при стартовой тяге 873 тс (тяговооруженность 1.17). Заявленная грузоподъемность составляет не менее 14 т, что выглядит несколько нелепо для ракеты более тяжелой, чем «Протон-М» или «Ангара» и лишь немного уступающей CZ-5B по стартовой массе. Очевидно, такова плата за унификацию по основному блоку первой ступени и за ее повторное использование. Ступень предполагается спасать путем спуска на баржу с захватом в момент зависания фиксирующей сетью тросов.
Орбитальная версия нового корабля может использоваться для транспортного обслуживания станции «Тяньгун» и будет весьма ценной в плане на Землю доставки результатов исследований – свыше 700 кг возвращаемых грузов против 50 кг у «Шэньчжоу».
Предполагается, что после первой китайской лунной экспедиции с исследовательскими целями начнется строительство научно-исследовательской и экспериментальной станции для долгосрочного пребывания людей на Луне и отработки средств добычи и использования лунных ресурсов. Дальнейшие планы включают создание к 2035 году сверхтяжелого носителя CZ-9 и осуществление к середине века (читай – к 100-летию КНР в 2049 г.) пилотируемой марсианской экспедиции.
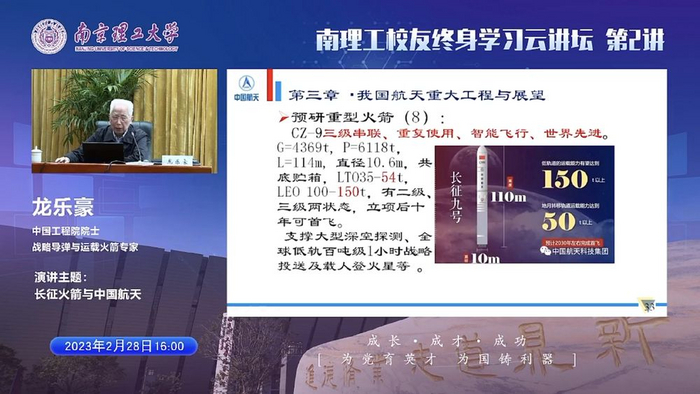
Очередная проектная версия CZ-9 представляет собой трехступенчатый носитель, выполненный в едином диаметре 10.6 м при общей высоте 114 м. Стартовая масса ракеты составляет 4369 т, а суммарная тяга двигателей первой ступени – 6118 тс. На первой ступени устанавливается 30 кислородно-метановых двигателей 200-тонного класса тяги, а на второй – два 200-тонника, на третьей – один 120-тонный кислородно-водородный двигатель с дожиганием YF-91. Предполагается спасать и использовать повторно первую ступень, а в перспективе и вторую. Ракета в двухступенчатом варианте сможет доставить от 100 до 150 т на низкую орбиту, а в трехступенчатом – отправить к Луне от 35 до 54 т.

В сентябре 2022 г. закончилась шестилетняя работа по освоению в производстве топливных баков 10-метрового диаметра для сверхтяжелого носителя. Кооперация включала более 20 научных и производственных центров Китая в Пекине, Чжанцзягане (Цзянсу) и Чунцине с окончательной сборкой в Ухане. Сваренный бак был подвергнут гидравлическим испытаниям, которые прошел с успехом. Сообщается, что это было одним из необходимых условий для утверждения проекта сверхтяжелой ракеты, первый пуск которой при быстром развертывании и благоприятном развитии работ может состояться уже в 2030 г.
И еще одна новость с пекинской выставки. Существенно изменились планы второго этапа развития станции «Тяньгун». Если до сих пор всегда говорилось о запуске запасного экземпляра Служебного модуля «Тяньхэ» и двух новых научно-исследовательских модулей, то теперь заявлено о создании специализированного узлового модуля с шестью стыковочными узлами – двумя осевыми на носу и корме и четырьмя периферийными. Судя по опубликованной анимации, модуль построен по схеме советского модуля «Квант» – он стартует с собственным двигательным отсеком, который отделяется после стыковки со станцией и освобождает кормовой стыковочный узел.

Ученые изучили мозг 13 российских космонавтов, которые совершали полеты на МКС с 2014 по 2020 год. Выяснилось, что под длительным воздействием микрогравитации у космонавтов перестраиваются связи между структурами мозга, отвечающими за адаптацию к незнакомым условиям. Эти связи не всегда возвращаются к исходному состоянию после полета. Статья опубликована в журнале Communications Biology.
Длительное пребывание в космосе вызывает в организме человека физические изменения. Например, ухудшается состояние костей и мышц. Поэтому здоровье космонавтов пристально изучается медиками и учеными. Однако о том, как такие экстремальные условия влияют на мозг, известно мало.
Мозг человека обладает нейропластичностью — высокой адаптивностью к изменениям среды. Это свойство помогает учиться новому и восстанавливаться после травм. Один из механизмов нейропластичности — изменение силы связей между отделами мозга, утрата этих связей и приобретение новых.
Ключевое изменение среды, с которым сталкиваются космонавты на МКС, — воздействие невесомости. Постепенно космонавты привыкают к отсутствию земной гравитации. Однако до сих пор мало известно о том, какие мозговые структуры обеспечивают это привыкание. Также неизвестно, возвращаются ли системы мозга в прежнее состояние по возвращении на Землю.
Чтобы оценить, как перенастроились связи в мозге космонавтов после длительного воздействия невесомости, международная команда ученых изучила изменения у 13 российских космонавтов, которые совершали полеты на МКС с 2014 по 2020 год. Участникам сделали сканирование мозга с помощью функциональной магнитно-резонансной томографии (фМРТ) трижды: до полета в космос, а также сразу после него и спустя 8 месяцев. Двое космонавтов прошли диагностику дважды за весь период исследования — после двух своих полетов.
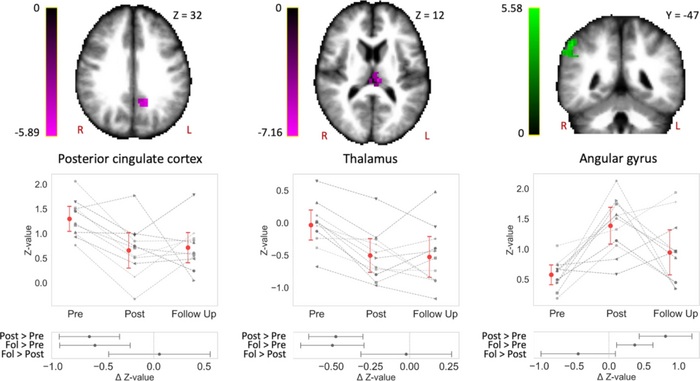
Используя фМРТ-данные, ученые оценили, как изменилась сила связей между различными участками мозга до и после полета. Активность мозга космонавтов в состоянии покоя сравнивали с результатами сканирования 14 человек в контрольной группе. В результате исследователи обнаружили изменения в связях мозга космонавтов, влияющих на адаптацию к новым ощущениям.
Так, сила связей с различными областями мозга снизилась у задней части поясной извилины. Эти изменения сохранились спустя 8 месяцев после полета. Поскольку поясная извилина вместе с областью предклинья является ключевым узлом так называемой сети пассивной работы мозга (DMN, default mode network), то изменения ее связей могут сигнализировать об общемозговых эффектах адаптации к незнакомым сенсорным ощущениям в условиях космического полета.
Меньше связей с различными зонами продемонстрировала и структура мозга под названием таламус, в особенности — с префронтальной корой. Связи между префронтальной корой и таламусом обеспечивают адаптивное принятие решений и функционирование рабочей памяти.
В угловой извилине правого полушария наблюдался рост связности с другими зонами мозга — как сразу по приземлении, так и спустя 8 месяцев после полета. В условиях невесомости угловая извилина активно вовлечена в сравнение сенсорных ощущений с ожидаемыми результатами действия и в создание плавных двигательных паттернов в ответ на эти ощущения, поскольку привычные движения совершаются иначе, чем на Земле. Известно, что космонавты со временем адаптируются к новому состоянию, — именно эту адаптацию может отражать рост связей угловой извилины с другими структурами мозга.
Единственная структура, для которой связность вернулась к исходному состоянию спустя 8 месяцев, — островковая доля. Островковая доля относится к сети выявления значимости (salience network) — системе мозга, которая отвечает за поиск значимых стимулов в окружающей среде и выбор подходящего ответа на них.
Ученые также заметили снижение связи островковой доли с поясной корой, что указывает на подавление вегетативных реакций в отсутствие привычной силы тяжести. В начале полета космонавты испытывают космическую болезнь движения —состояние укачивания, похожее на морскую болезнь, — однако затем она проходит. Перестройка связи между островковой долей и поясной корой может отражать эти изменения.
Вместе эти результаты говорят об устойчивых изменениях в сенсомоторных и вестибулярных системах мозга после длительного воздействия невесомости, которые могут отражать адаптацию человека при освоении им новой среды.
«Эти изменения функциональные, они опасны не более, чем любая другая адаптация к сложным условиям. У людей с наземными экстремальными профессиями и увлечениями существуют такие же риски с точки зрения работы мозга, — комментирует Екатерина Печенкова, ведущий научный сотрудник Научно-учебной лаборатории когнитивных исследований НИУ ВШЭ. — Поэтому основное направление работы с этими изменениями у космонавтов — использовать полученные знания для разработки упражнений. Они сделают подготовку к еще более длительным (в перспективе — межпланетным) космическим полетам легче и при этом позволят быстро адаптироваться по возвращении на Землю».
Текст: пресс-служба ВШЭ
Jillings, S., Pechenkova, E., Tomilovskaya, E. et al. Prolonged microgravity induces reversible and persistent changes on human cerebral connectivity. Commun Biol 6, 46 (2023). https://doi.org/10.1038/s42003-022-04382-w
Продолжаю выкладывать своё. Туманность Ориона, Nikon d800 и Tamron 85mm 1.8 . Место съёмки - Севастополь



