Доброго всем времени суток, продолжаю серию постов про образовательную робототехнику. Здесь я описываю результаты и просто ход выполнения своей научной работы.
Кратко: разрабатываю специальную робо-накидку на одежду, которая сможет оцифровывать часть двигательных навыков мастеров своего дела и передавать это тем, кто только учится.
О чем этот пост: о дальнейшем планировании эксперимента по сбору данных с костюма для захвата движения, о выходе из провала по финансированию проекта.
Содержание:
Часть 1: Решение финансовых вопросов.
Часть 2: План будущего эксперимента.
Часть 1. Решение финансовых вопросов.
С момента предыдущего поста прошло 34 дня и за это время был потерян еще один источник финансирования проекта. Иными словами все прямые гранты на проект были прекращены. Осталась аспирантская стипендия и ставка ассистента преподавателя. Первую неделю я немного был в состоянии апатии. Потому как осознал, что если ничего не поменяется то рискую после получения научной степени получить серьезный карьерный рост в виде потери аспирантской стипендии и остаться со своими 5 тысячами в месяц. НАДО СРОЧНО ШЕВЕЛИТЬСЯ подумал я. Так и сделал.
Первый мой порыв - зайти на сайты по поиску работы. (Логично, не правда ли?) Собственно там я искал в первую очередь две позиции: по машинному обучению или преподавание робототехники. Стоит учитывать, что из всего списка мне подошла бы та, на которой я таки смогу получить научную степень (мечта есть такая, да), но и в то же время будет перекрывать просто первостепенны потребности. Варианты нашлись. Около 7 заявок по робототехнике и около 4 по машинному обучению. По робототехнике не стал звонить, что-то совсем детское и далекое от того, чтобы держать мозг в тонусе. А вот рядом с местом где живу строиться большой комплекс большой IT компании СКБ-контур. Составил резюме, пообщался с HR менеджером. Круто, понравилось как у них общаются, как ведут. В общем жду пока тим лиды посмотрят выполненное тестовое задание.
За это время предлагают съездить на базу отдыха, но не совсем отдохнуть, а с одаренными школьниками позаниматься на Таватуе. За небольшую копеечку на 5 дней. Ребята смышленые. Был бы рад сам в свое время так же побывать. Кто-то занимался технологией ай трекинга для автоматического перевода текста (читаешь текст на англ, остановил взгляд на слове, а он его переводит), кто-то с нейронными сетями анализирует медицинские снимки для диагностики здоровья, кто-то занимается автоматизацией составления школьного расписания по сан-пинам, кто-то пилит телеграмм ботов. В общем помогали вместе с коллегами ребятам допиливать проекты для финальной презентации. После чего победителям дали поездку в сочи в другой крутой лагерь для умных детей. Сам я в перерывах занимался своей диссертацией.
Когда приехал, то узнал, что не понравилось мое тестовое задание и мне отказали в СКБ-контуре. При этом приложили рекомендацию над чем стоит поработать и предложили позже возможно снова списаться. Я согласился.
Я поспрашивал у знакомых, может есть какая-то работа. Мне помогали советами. Так мой коллега, кандидат физ. мат наук сказал, что собирается писать докторскую диссертацию и на работе сис. админом ищет замену. За серверами поглядывать. Все показал, рассказал. Хороший вариант. Договорились, что с мая наполовину будем работать, а там посмотрим как карта ляжет.
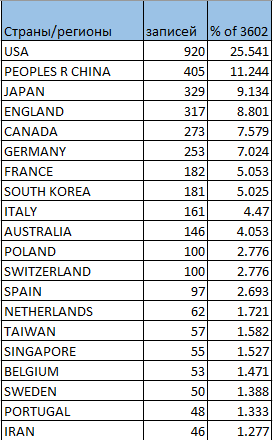
Так же узнал, что с университетом сотрудничает фирма, которая занимается машинным зрением и обрабатывает спутниковые снимки. Подробностей не знаю, но буду еще с ними встречаться на следующей неделе. Тоже интересный вариант. Плюс сходил на дни карьеры, которые проводил мой университет. Посмотрел на другие фирмы, пообщался с представителями из Кольцово, банков разных, операторов связи, трубных компаний, трансформаторных компаний. Есть интересные места. На мероприятии было куча очков виртуальной реальности, всяких игрух, пуфиков ярмарки, танцевальных номеров и прочей движухи. Все ярко, забавно. Из всех крутых штук мне особенно запал в душу 3D пинг-понг.
Так же я еще являюсь нормоконтролером на кафедре и в начале неделе будем считать часы переработки для грядущей сессии. Групп много, работы много. Ну и вишенка на торте. В прошлом семестре я зарегистрировал три свидетельства на программу ЭВМ и по программе стимулирования мне дали надбавку на год в 570 рублей. Ну и есть еще пара необработанных предложений на середину мая.
Еще я думал про варианты подачи заявки на новые гранты. Может на СТАРТ18. Может краундфайдинг. Но почему-то грантами я наелся, а в краундфайдинг не особо верю. Ибо чтобы заниматься его продвижением, нужно заниматься его продвижением, а не наукой.
В общем я подумал, что это хорошая возможность продолжить полностью независимую разработку. И что варианты есть, если шевелиться активнее.
Часть 2. План будущего эксперимента.
У меня есть один магистр, который выпускается в этом году. Появился один бакалавр, который тоже защищается в этом году.
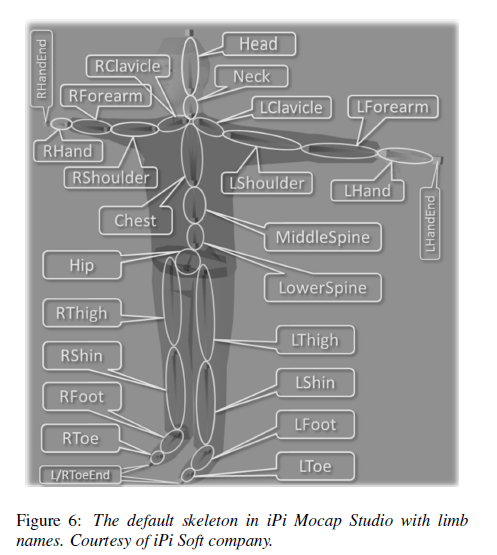
Один решает вопросы выбора оптимального алгоритма постобработки выходных данных и настройкой алгоритма. Второй решает задачу разработки сетевого моста. Для маршрутизации данных с робототехнической накидки через телефон на удаленный сервер. Посмотрим, что из этого выйдет летом.
Так же была проведена встреча-знакомство с заведующим лабораторией на Радиофаке. Там есть все необходимое оборудование для производства малой партии плат. Причем весь цикл, вплоть до монтажа деталей. Возможно договориться на оплату университетскими квотами для студентов университета (кто не знал - аспиранты тоже студенты. Я в кино беру льготу все еще). Очень понравились и люди и лаборатория. Как подготовлю новую версию - буду с ними работать.
Я же в это время решал ключевые для проекта задачи. В первую очередь это следующие задачи:
1) Настройка бесперебойной работы магнитометра (из-за которого и пошла тотальная перестройка схемы первоначально). Оказалось, что я где-то в схеме накосячил, ибо с подобной проблемой нашел только одного зарубежного коллегу. https://github.com/BoschSensortec/BMM050_driver/issues/7 Магнитометр то включается, то выдает нули постоянно. Это очень не очень. BMM050 входит в состав BMX055.
2) Повышение автономности работы устройства. Это можно сделать тремя путями.
2.1) Понижаем выходное напряжение. Минимум - 2.7В получается, но можно и до 2.4В опустить.
2.2) Повышаем емкость батареи. Мне из китая аккумы на 3400 мач. пришли против 1200, которые были.
2.3) Заменяем сам микроконтроллер. Есть варианты с заменой чипов ESP8285 на Attiny13a (геморройно, но реально и места мало занимает) или микроконтроллер, который стоит в Arduino Pro Mini. У первого энергопотребление около 9ма, второго 15ма. Напоминаю, что у ESP8285 самый минимум, которого удалось достичь это 23ма с полным отключением WiFi. Так, что идейно - это просто 32 битный МК. А вероятная замена 8 битная, что может быть проблемой.
И так, что мы имеем:
1) Хотим защитить диссертацию.
2) Открыть технологическую компанию, которая занимается образовательной робототехникой.
3) Хотим хлеба и зрелищ (шучу, хватит просто денег. зрелищ хватает выше головы). И желательно не в светлом будущем, а в суровом настоящем.
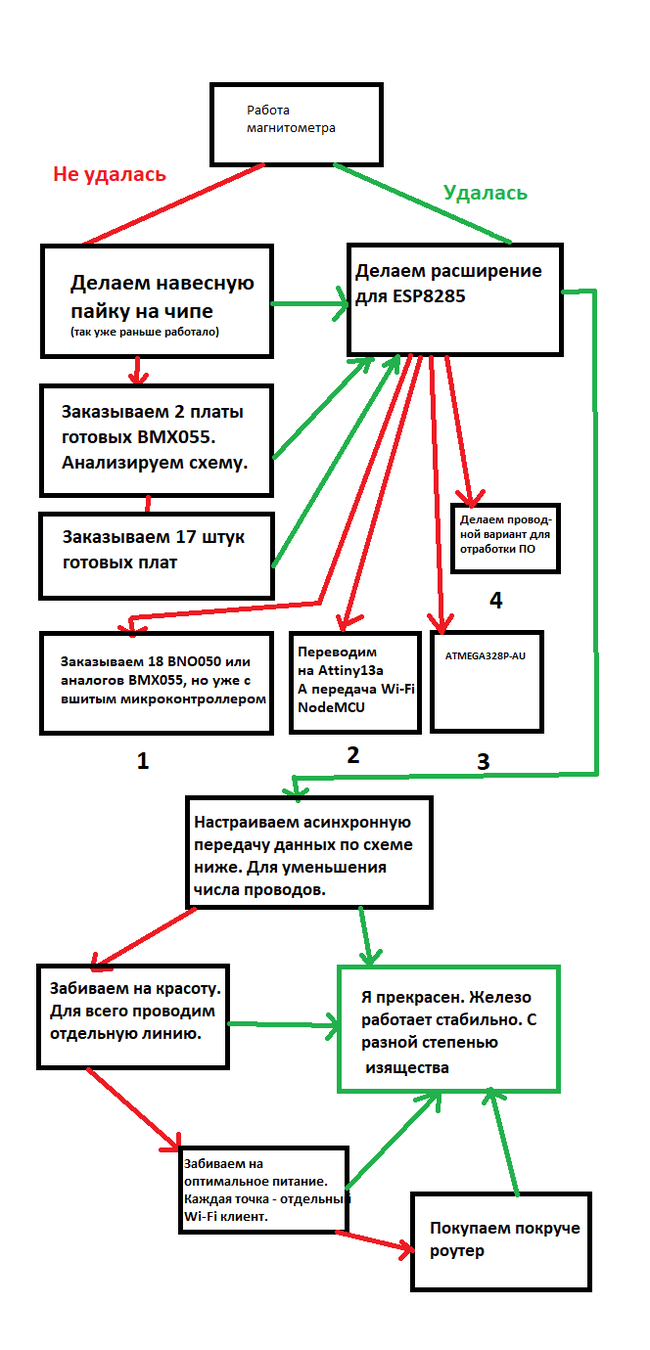
Давайте нарисуем как в теории игр граф всех возможных вариантов действий и событий. С учетом того, что я безусловно буду до последнего вздоха работать над тем, чтобы этот проект выстрелил.
Для варианта 1: Надо запустить этот микроконтроллер (это займет около двух недель-месяца, так как МК Cortex, а с ним я не работал). Надо агрегировать данные. Это уже проще.
Для варианта 2: Тут надо реализовывать i2c и UART программно. Готовые в сети решения есть. Но они не проверены. Можно надолго подсесть, но результат может того стоить. Может не получиться из-за маленького объема памяти.
Для варианта 3: С этим я уже работал. Единственная сложность - надо делать миниатюрную минимальную плату самому. Плюс если получится у меня всего 4 таких штуки, а надо 16-18.
Для варианта 4: Подойдет, чтобы показать что принципиальная возможность вычленения паттерна движения есть. Подойдет, чтобы обкатывать программу и немного отдохнуть от железа.
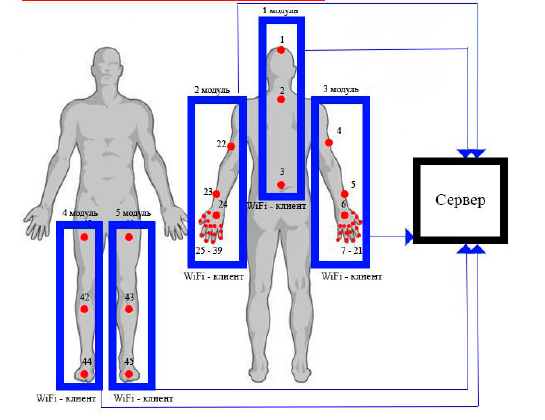
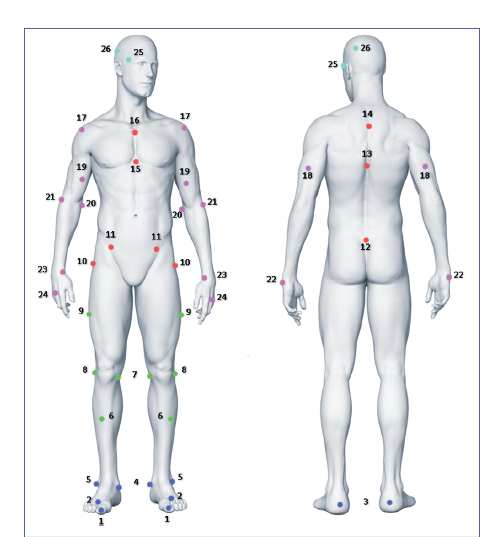
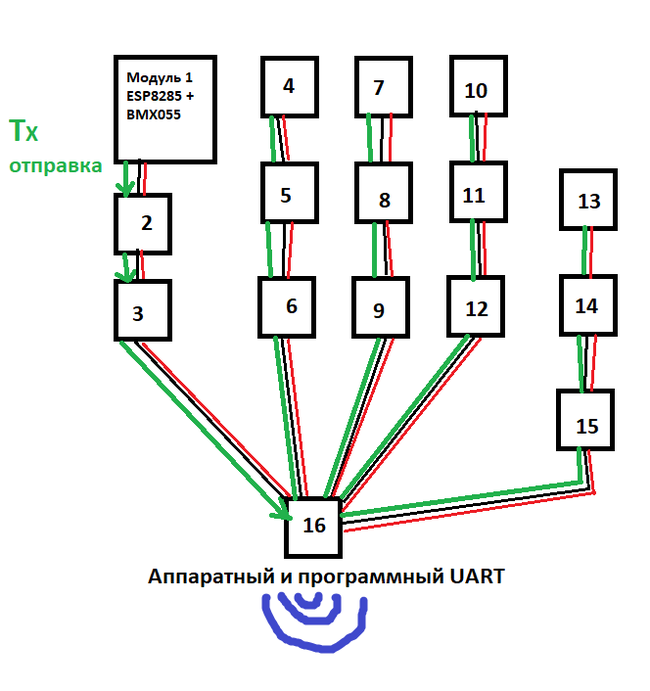
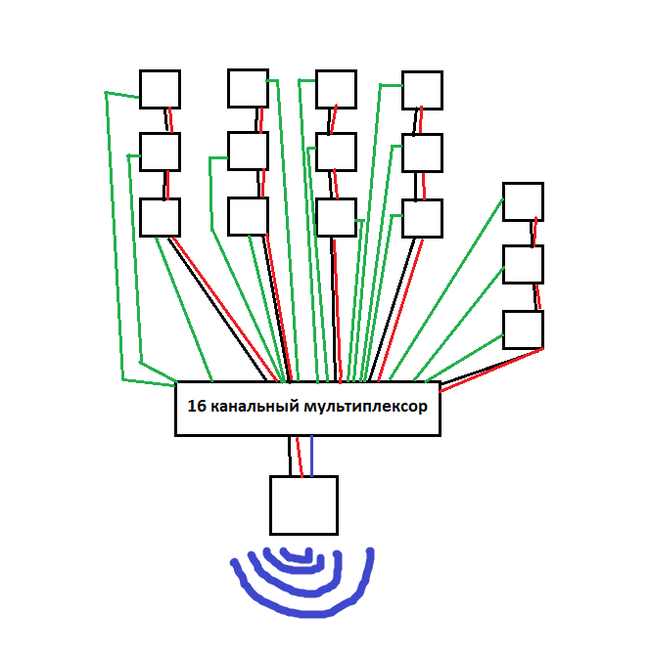
Схемы потока данных:
Первая, красивая.
Вот такие планы на будущее.
Кстати, кто не знал - для студентов GitHub предоставляет бесплатную подписку. Которая обычно составляет 7$ в месяц и позволяет создавать неограниченное число закрытых репозиториев. Надо только студенческий приложить в виде фотки и краткую анкету заполнить. Вот тут.
Всем спасибо за подписку.