Всем приятной пятницы, друзья. В очередной раз пытаюсь поддержать древнюю традицию пятничного тега "моё".
На этот раз на повестке дня у нас самодельная лодка на радиоуправлении на основе платформы ардуино. В очередной раз предупреждаю, я не профессионал, не кодер, не электронщик и не маляр. Это просто хобби.
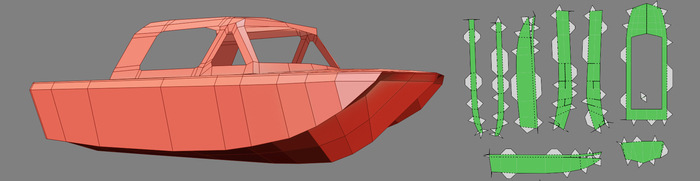
И так, летс шоу гоу он! По времени проект занял около месяца-полтора неспешными свободными вечерами. Начал я с корпуса. Смоделировав его в 3ds MAXе перебросил в Pepakur'у, и вытащил оттуда развертку.
По этой развертке вырезал детали корпуса из гофрокартона и склеил их суперклеем с добавлением пары поперечных шпангоутов (форму в итоге немного повело, но не сильно, можно забить)
Затем куча слоев эпоксидки, газет, кусочков серпянки и еще больше эпоксидки (ушла целая пачка).(Дальше фотки чуть хуже, телефон утопил и начал фоткать на тапок)
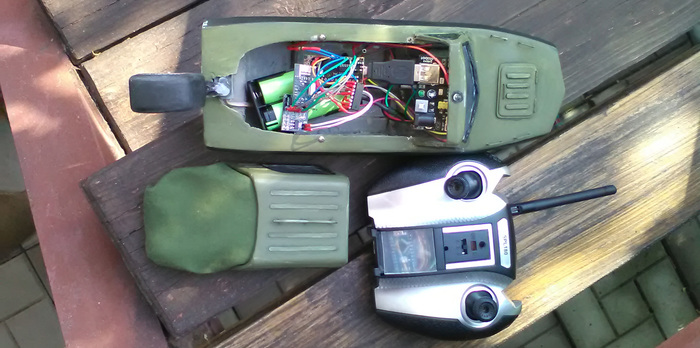
Параллельно пока сох корпус - я делал гребной винт из банки от кукурузы и велосипедной спицы (на фото уже после покраски), тестировал электронику и "собирал" пульт (на самом деле за основу был взят готовый пульт от старого вертолетика и мне не пришлось тратиться на джойстики и кнопки, просто перепаял все под свои нужды, поменял батарейки на аккумуляторы 18650 и впихнул туда радиоуправление вместо стокового ИК).
После высыхания корпуса — шпатлевка - шлифовка - шпатлевка - шлифовка и так пока не выровнил. Шпатлевал автомобильной двухкомпонентной шпатлевкой.
Финишная шлифовка, добавление деталей и пара слоев грунтовки сверху. Вы спросите, что же самое приятное можно нащупать в этой жизни? А я вам отвечу — деталь "отполированная" наждачкой с зернистостью 1200..
Ну и самая приятная часть после которой видно какой-никакой результат — это, конечно же, покраска. Красил модельной краской от Звезды мастер-акрил (некоторые детали, кстати, добавлял обычным акрилом от них же, они немного посмывались от воды в последствии, но база сидит как родная). Так же покрасил руль, который выполнен в виде лодочного мотора. И приклеил тряпочный тент, что бы вода внутрь не попадала и что бы начинка вид не портила. Крышка крепится на магнитах.
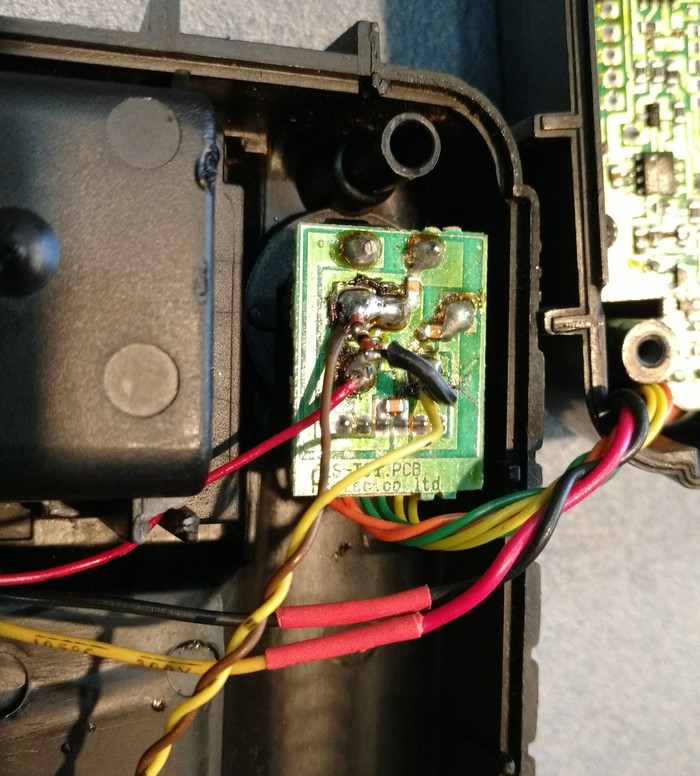
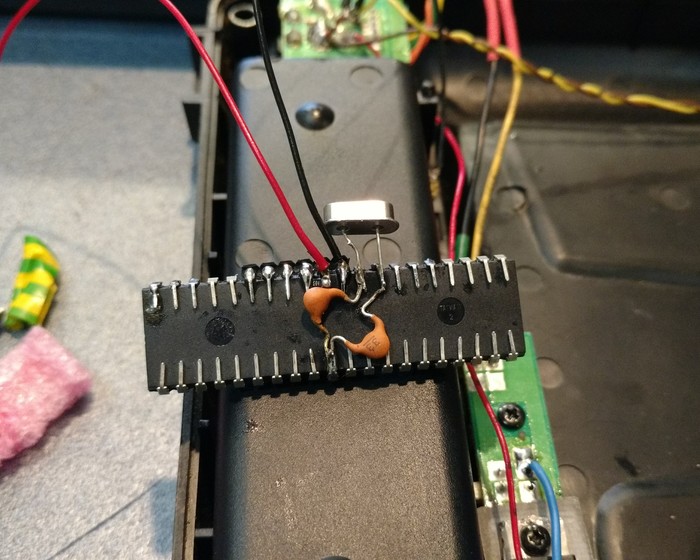
Получилось вот так. Затем я начал пихать туда электронику. В этом проекте использованы две Arduino nano, радиомодули nRF24L01 с антенной и без, плюс понижайки напряжения для них (по заветам великого и могучего @AlexGyver ), другие преобразователи напряжения (в пульте у меня 3.7В от одной 18650, а в лодке — от двух 7,4В), сервомоторчик, обычный моторчик на 3-5В, драйвер двигателя (что бы плавно повышать обороты, но из-за трения и густой смазки - толком обороты не регулируются, начинает подхватывать только на второй половине хода джойстика) и то что было в пульте — джойстики да кнопки. Плюс три светодиода с резисторами для ходовых огней.
Вышла модель очень медленной, из-за моторчика в первую очередь, но как говорится, из того что было — первый блин в лес не убежит. А во-вторых: велосипедная спица, которая соединяет мотор и гребной винт немного дрожит в дейдвудной трубе, отчего дополнительная потеря оборотов и мощности. На последок вот видео первых испытаний на большой воде. Всем хороших выходных и до новых встреч. Задавайте вопросы в комментариях, с радостью отвечу. Строго не пинайте, это мой дебют в судомоделизме.