Меня зовут Слава. Я из Молдовы. Это невероятная история моей жизни и о том, как я сделал робота для сбора мячей для гольфа.
Молдова одна из беднейших стран в СНГ и в восточной Европе. У нас нет гольфа, дорогих машин, роботов и богатых людей.
Мои дедушка и бабушка бизнесмены. У них своя точка на базаре, их все знают.
Мой дядя работал раньше в Германии, потом пригласил меня.
В Германии мы работали в гольф клубе, там я впервые попробовал гольф. Я был восхищен!
По возвращению в Молдову я весь в мыслях был лишь о гольфе.
Хотя на тот момент только президент страны и его друзья пробовали гольф.
Я вернулся на работу в Германию. Большинство времени в Германии мы собирали мячи для гольфа.
Мой дядя очень быстро учится. Он и в Молдове водил телегу, поэтому за пару месяцев он получил права и стал собирать мячи на машине.
Однажды у него была авария и он сильно травмировал копчик. Как он говорил, это была не его вина, просто канава не в том месте.
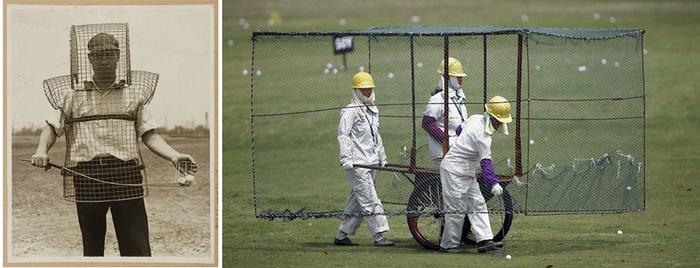
С нами работал Рашид из Афганистана. Он рассказал, что в Кабуле мячи собирают роботы.
Так я решил сделать своего робота.
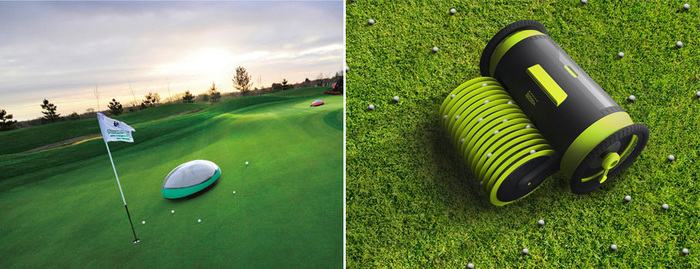
Планируется несколько основных преимуществ относительно существующего коммерческого решения.
Отсутствие необходимости закапывать слаботочный кабель по периметру.
Возможность внедрения в уже существующую инфраструктуру.
Более низкая стоимость и совокупная стоимость владения.
Корпус и механическая часть
Материалом для корпуса первого образца была выбрана фанера. Дешево, позволяет на месте быстро подрезать какие-то части или просверлить отверстия. Чтобы все было четко подогнано набросал чертеж и отдал на фрезерную резку.
Собрал все детали. С самого начала была идея сделать корпус скругленным, но решил остановится строго на MVP. Все, что не влияет на работоспособность пока умышленно исключаю из todo-листа.
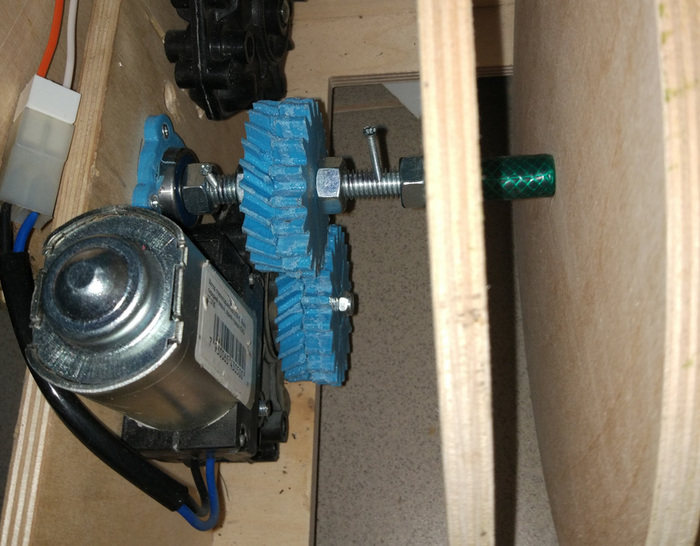
Механизм захвата мячей в процессе эволюции данных приспособлений показал свою эффективность, поэтому другие варианты не рассматривались.
По двигателю 12V 30 Н/м. на каждое колесо. Такой же двигатель крутит вал с дисками захвата, так как они подняты над поверхностью для облечения поворотов и повышения маневренности.
Изначально двигатели были noname китайские. В описании не было момента, поэтому риск был велик. Момента явно не хватало, что не скажешь о двигателей от стеклоподъемников.
После смены двигателей пришлось напечатать другие шестерни.
Электроника
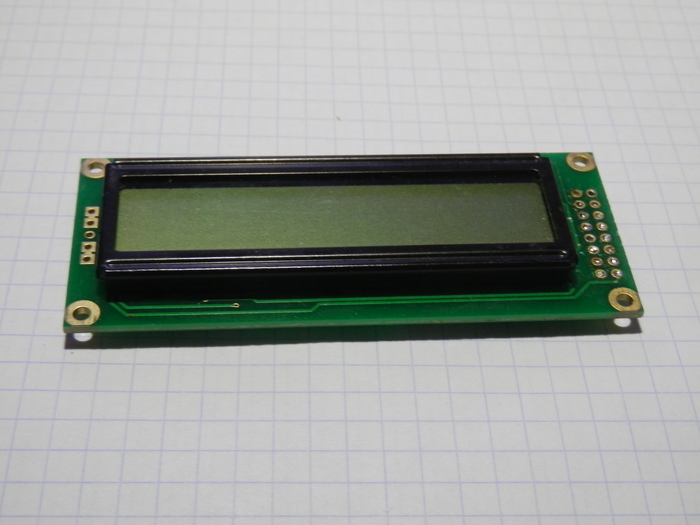
Так как ровер должен работать без электромагнитного кабеля по контуру поля ему как-то необходимо ориентироваться и искать базу для сброса шаров и подзарядки.
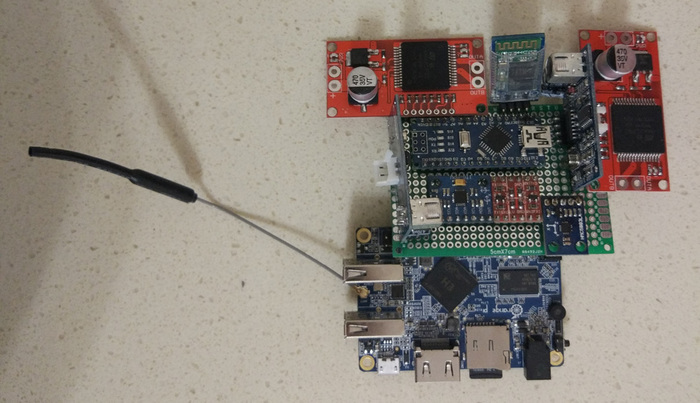
Принял решение использовать Orangepi lite и arduino для более удобной работы с 5v без зоопарка конверторов уровней для каждого датчика и драйвера двигателей.
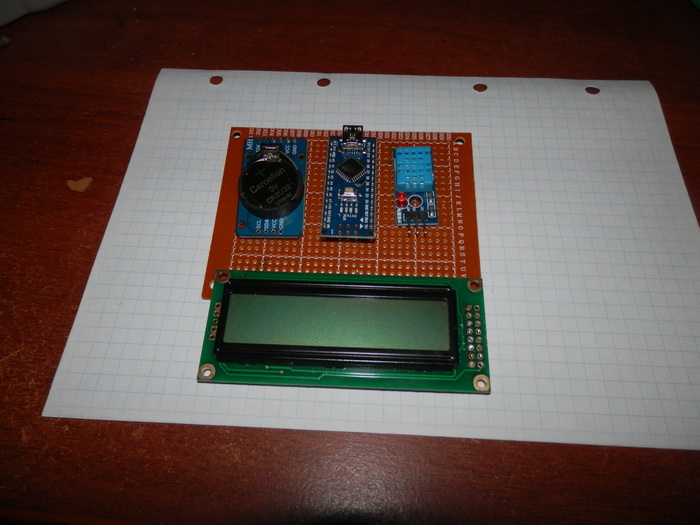
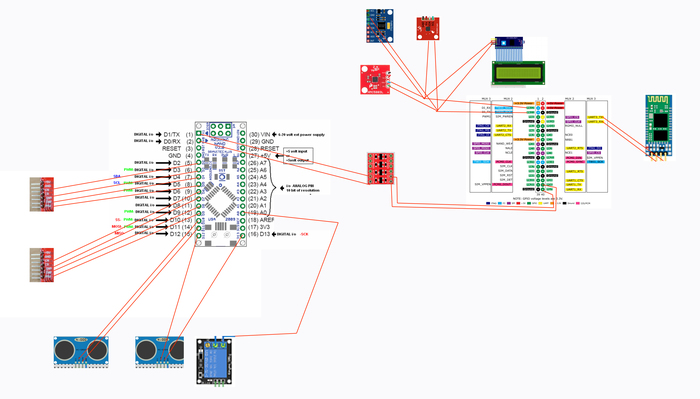
Собрал все из готовых модулей на макетной плате. Сказывается отсутствие опыта в схемотехнике, думаю в дальнейшем не проблема будет развести плату под модули или под дискретные элементы и заказать.
Схема состоит из 11 план, 11 Карл!
— Orange Pi Lite
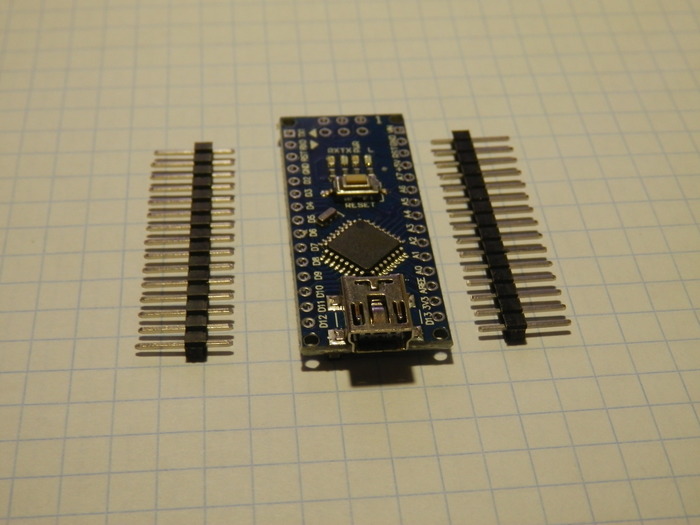
— Arduino nano
— GPS модуль GY-NEO6MV2
— 2 драйвера двигателя VNH2SP30
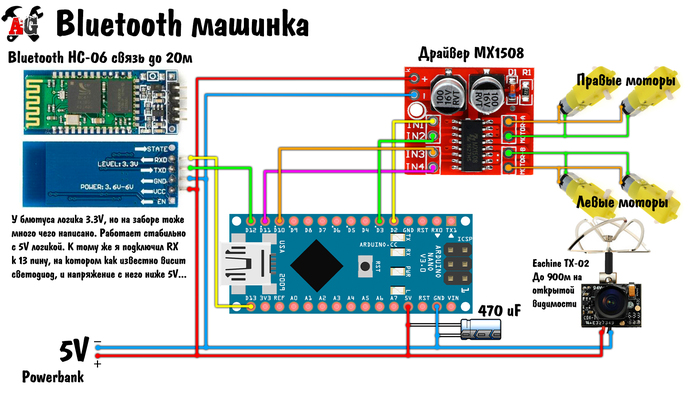
— Bluetoth Hc-06
— 2 ультразвуковых модуля J34
— Конвертер логических уровней
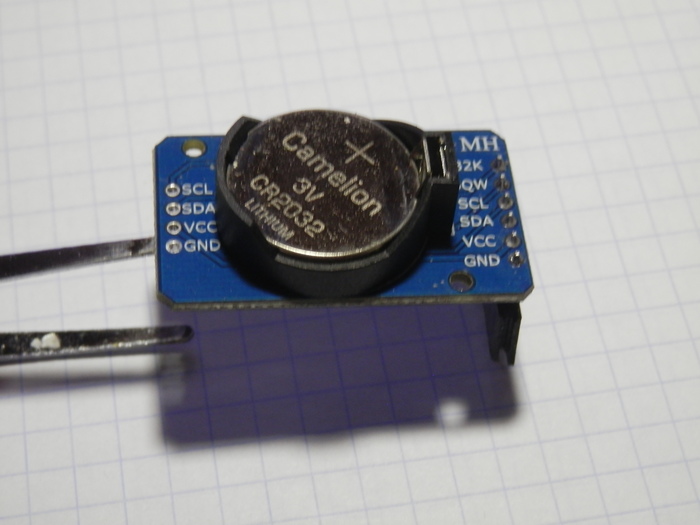
— Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050
— Блок из двух реле
Конечно это было сделано для быстрой сборки, монтажа и замены модулей.
Уже сейчас ровер собирает 95-100% мячей на своем пути. Строит маршрут внутри полигона по GPS-координатам. В планах:
Нахождение базы для сброса мячей и зарядки по визуальной метке.
Сервопривод сброса мячей.
Датчик переполненности отсека с шарами.
WEB-интерфейс для визуального указания точек на карте, построения зон для сбора мячей с разной периодичностью.
Корпус.
Размещение робота в гольф-клубе в Москве для теста в боевых условиях.
Я открыт для диалога, советов, помощи, предложений.