Долгая история о том как я собственное файловое хранилище долго хотел и как к нему докатился
Для тех кому неохота/неинтересно/лень читать весь квест - сразу спойлерну ссылкой на описание устройства, которое и стало результатом моих изысканий.
Сначала была идея.
Заиметь себе файловый сервачок придумалось давно, с появлением безлимитных тарифов на интернет наверно. Особых изысков не требовалось, так - архивное файло хранить, да торренты качать-раздавать. Но компьютеры тогда были большими и появление еще одного жужжащего обогревателя в квартире особого энтузиазма вызывало мало. В надежде что попадется подходящая шаровая железка на работе, идея была отложена.
На годы как оказалось.
Потому что работу поменял кардинально, выпал из струи.
С появлением неттопов руки зачесали вновь. Был куплен таковой, на атоме, для родителей, в качестве замены десктопа, безнадежно устаревающего своей начинкой миди-тауэра. Однако освободившееся железо повергало в уныние своими размерами и отсутствием SATA вкупе с горячим Бартоном. Хотя со сменой работы идея покупки готового NAS выглядела уже не совсем финансово неразумной. А помешала (или выручила) командировка на много месяцев. И идея опять утонула в других заботах. Зато потом был куплен приличный роутер c USB, на котором и Samba и miniDLNA и Transmission успешно работали с внешним хардом.
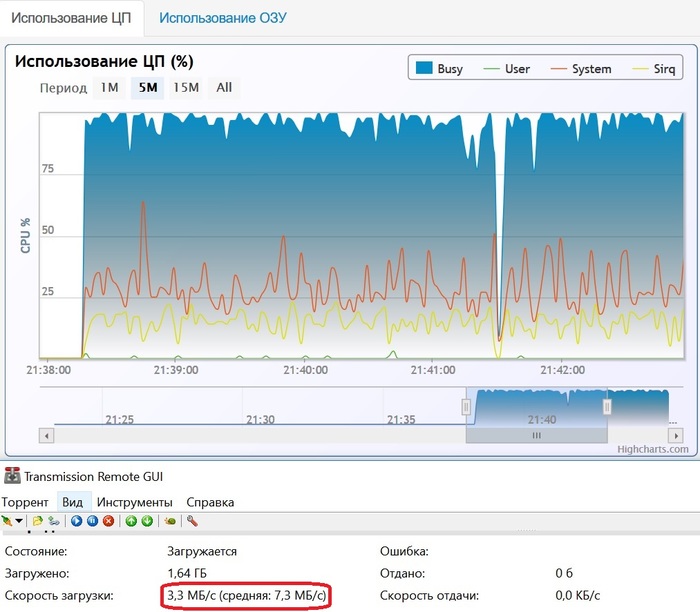
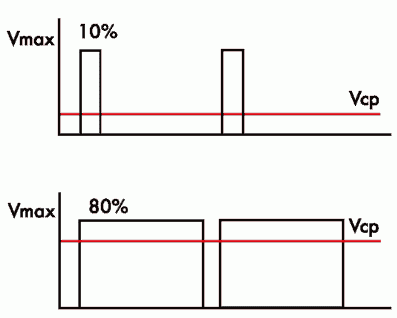
Только не радовала 100%-ная загрузка процессора роутера при закачке (ниже приложено окошко жуя для Transmission, чтоб для наглядности было видно загрузку сетевого интерфейса):
Стрим киношки через длна, кстати, процессор нагружал пренебрежительно мало, так что ресурсов хватало и FHD стримить на телек по вайфаю и торенты качать одновременно.
Но вот полная загрузка процессора при работе трансмишшена внушала сомнения в долговечности и надежности такого решения.
И однажды, читая околокомпьютерные новости, узнаю что малина уже до следующей версии обновилась. В интернетах появилась куча статей о том, что из нее можно сделать все что душе угодно, и какой из нее NAS чудесный получается. Но выяснив что сеть и накопитель висят у нее на одной шине, которая еще и 2.0, энтузиазм быстро погас и стало понятно откуда такая цена у малинки.
Все говорило в пользу нюкообразных или специализированных решений. Только вот как-то неинтересно вдруг стало совсем и хотелось минимализма. Тем более что изысканных возможностей да супер надёжности и не требовалось собственно.
И опять идея осталась без воплощения…
Хотя нет – роутер то продолжал трудится на все 100.
А тут и NanoPi NEO выкатили с красивым домиком для жесткого диска:
Красивая коробочка, хочу такую же!
Но сначала - почитать, проверить характеристики, а то на офсайте просто и скромно: USB хост.
Зато на линукс-санкси нашлось что хост этот у Нео – 2.0! А в красивой коробочке - мост SATA–USB3.0. Ну как так то?!
Ёптель! Шёл, шёл…
И Neo2 туда же. Хорошо хоть сетка не так как на малине организована…
В общем опять мимо. Оно то конечно, производительности хватит для файлопомойки, но мой внутренний перфекционист недоволен, ибо еще помнит, что полудуплексная шина передачи данных это уже прошлое в таком деле.
Однако тем не менее факт в том, что разработчики обратили внимание на нишу бюджетных NAS, и значит что-нибудь достойное скоро появится.
И в поле зрения появляется еще одна заманчивая картинка:
Пусть плата голенькая, зато то что надо!
Ищем что тут у нас и кто… Orange Pi Plus2… AllWinner H3… Уже где-то встречали. Ага у Нио такой же.
Стоп, а откуда ж тогда сата тут? На офсайте ничего, зато на других картинках удается рассмотреть GL830 USB2.0 to SATA мостик. Как жалуются довольно хилый, например кажется тут народ пишет что ну нефонтан совсем. На NEO/NEO2 мостик то получше будет.
Какое-то прям надувательство от производителей.
Кто же тогда спасет сердце моего роутера от каторжного труда?
Неужели и некому, кроме товарища Интела с его Нюком или господина QNAP и иже с ними…
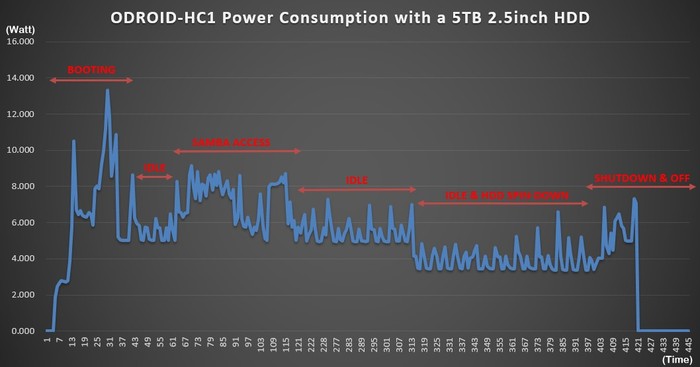
А в процессе раздумий брать маленький неттопчик или купить готовый NAS, почитывал форумы, аккумулируя информацию по решениям для файлового хранилища. И попался мне на форуме армбиана интересный обзорчик с такой вот картинкой:
Картинка мне понравилась, точнее циферки на ней, собственно как и сам обзор небезызвестного в тамошних кругах товарища. Правда замеры были на SSD диске, а таковой я не планировал, кусается, да и дома были вполне себе живые винчестеры 2,5, но тем не менее выглядело многообещающе.
Кстати в том же топике, да и на форуме в целом, довольно много нареканий на стабильность работы связки "одноплатник - юсб разъём – юсб кабель – микроюсб разъём – юсб/сата мост – жесткий диск". Суть их в том, что «электромеханическое» качество разъёмов и кабелей является основным источником перебоев в работе системы. Поэтому решения типа такого как в обзоре - предпочтительный вариант для файлового хранилища в случае отсутствия нативного SATA, потому как кабель с сопутствующими разъёмами просто исключены (а зато еще и минимальная длина проводников опять-таки).
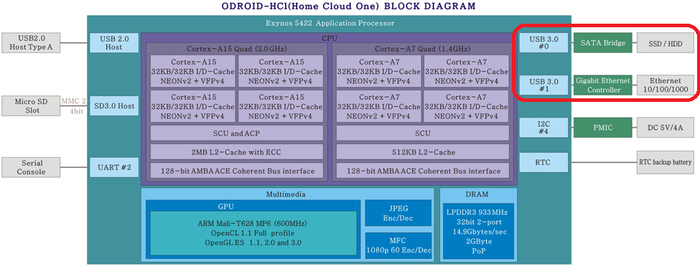
Но вернемся к нашим баранам, а именно к плате Odroid HC1:
Подобно кит-набору Нео/Нео2, эта плата так же поставляется с домиком, правда не таким симпатичным и черным, зато более плоским (низким), что даже лучше. Сам миникомпьютер имеет довольно солидные характеристики:
• SoC Exynos5422, ARM Cortex-A15 @ 2GHz, ARM Cortex-A7 @ 1.4GHz
• GPU Mali-T628 MP6
• 2GB RAM LPDDR3
• Gigabit Ethernet
• Разъем microSD (до 128GB)
• SATA интерфейс через JMicron JMS578
• USB 2.0 Host x1
• Разъем для подключения батареи резервного питания для RTC
• Последовательный порт для отладки
• Светодиодная индикация активности
• Питание: 5V4A (через разъем 5.5 х 2.1mm).
И отсутствие не нужных в моём случае GPIO и прочих гребенок. И питание через нормальный разъём, а не вечно разболтанный микроюсб. Кроме того, производитель разместил ну очень заманчивую картину энергопотребления:
Опять таки это для ССД. Но система на Интеле будет кушать наверняка больше, да и спецНАС тоже.
А еще изобретатели этого одноплатника утверждают что винт и сеть подключаются через USB3.0. А это же намного лучше чем 2.0 у одноклассников (фулл дуплекс, все дела…):
В общем и в целом меня всё устраивает, надо брать.
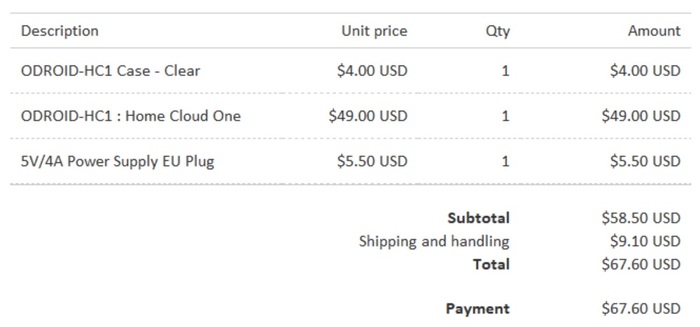
Самые приятные цены оказались на американском сайте, даже с учетом доставки и услуг посредников оказалось намного выгоднее покупать за океаном. Решил купить сразу и блок питания ихний, ибо подходящего у меня нет, а у нас приличный стоит чуть ли не дороже (ну а с самодельными блоками питания закончил еще в студенчестве), ну и пластиковую крышку обязательно. Рискну окончательно получить упрёки в рекламе, но размещу скрин платежки для полноты картины:
Комментировать не стану, у каждого своё видение бюджетности.
Для сравнения - комплект NAS Kit&NanoPi Neo2 с блоком питания будет стоить в районе 45 баксов в зависимости от опций и без доставки.
Пока посылка в пути изучаю что и как можно установить на этот Одроид (ибо моя работа уже давно в совсем другой сфере и актуальность познаний в плане софта осталась на прошлой работе) и оказывается что есть готовое решение - OpenMediaVault. Надстройка на Дебиан, точнее готовый образ для этой платы на Armbian, хотя можно и «from scratch» при желании. Ну значит будет apt-get.
Будущий NAS приехал, сборка не представляет сложности, только вот пластиковая крышка, состоящая из двух половинок, выглядит довольно дешевенько:
Ну да свои функции выполняет, защелка защелкивается, ничто не отпадает, от пыли предохранит, да и расположится она снизу, и вообще агрегат будет скрыт с глаз долой.
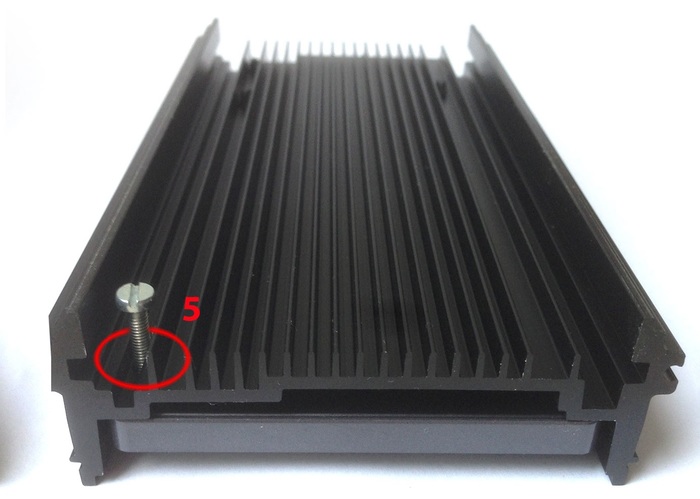
Дорабатывать напильником ничего не пришлось, кроме пары совсем уж мелких мелочей – для начала поставил шайбу под винтик фиксирующий винчестер, так как производители шаёбку зажали, а мне показалось не комильфо без нее покрытие царапать:
На цифру 5 на фото внимание не обращать, фото из нитернетов, а я не додумался еще и шайбочку заснять.
Про вторую доработочку будет позже.
Винчестер был позаимствован от внешнего ЮСБ-кармана, купленного лет 7 назад и у которого развалился корпус, не выдержав тягот дальних командировок.
Установка оси, и её конфигурирование тоже сложностей не вызывает, благо есть ODROID Wiki, на которой на доступном английском все пошагово расписано. Да и на русском языке найти подробный гайд, думаю возможно. Хотя несколько мелких нюансов при настройке все-таки выплыло. Нубских нюансов, чего уж там. Во-первых, на вкладке общих настроек в вэб-морде нужно сразу отключить автовыход, по умолчанию он всего через 5 минут, хотя если следовать инструкции на вики, то там есть это, но надо ж дочитать еще. А во-вторых для доступа рута через SSH нужно его сначала включить в вэб-интерфейсе на соответствующей вкладке. И в-третьих при попытке обновить систему с помощью вэб-морды или разными командами через консоль выпадают ошибки с сообщенями о многократно повторяющихся параметрах в конфигах. От танцев и гугла спасла кнопочка сброса на панели управления настройками обновления. В общем систему обновил, диск сконфигурировал, настроил нужные сервисы, права прописал. И новый обитатель квартиры отправился на место работы, а именно был водружен на “крышу” шкафа в прихожей, поближе к роутеру, к которому и подключается гигабитным заводским патчкордом, который таки дождался этого своего звездного часа.
И тут проявляется интересный момент. Оказывается, вращающийся винчестер создает вибрацию, которая успешно передается на шкаф, и этот шкаф начинает резонировать и эффективно усиливать вибрации сервера в слышимом звуковом диапазоне. Попытка создать виброразвязку, подстелив кусок вспененного полиэтилена оказалась малоэффективной.
Пришлось откопать в загашниках кладовки резиновые ножки “уже-непомню-откуда-взялись” и приклеить их двойным скотчем к пластиковой крышке корпуса:
Стало намного лучше, можно спать спокойно.
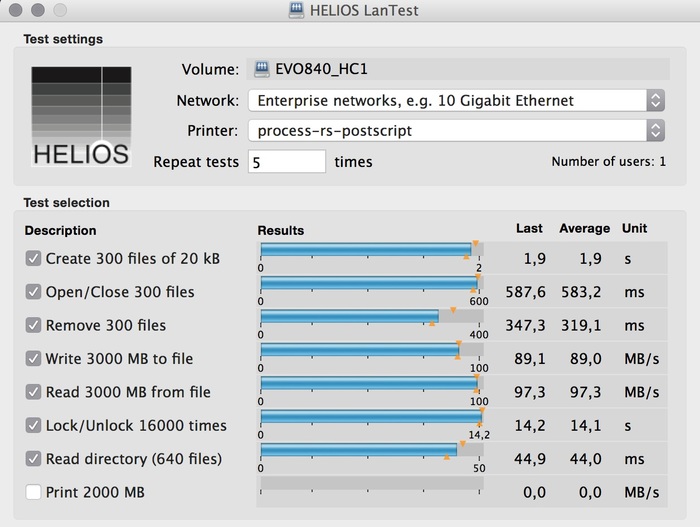
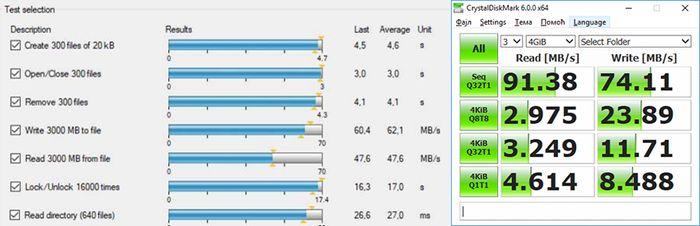
Однако спать не хотелось, да и рано еще, поэтому были проведены нехитрые тесты производительности Самбы програмулиной “как у них” и другой, более популярной у нас.
Напрямую соединив патчкордом с ноутом:
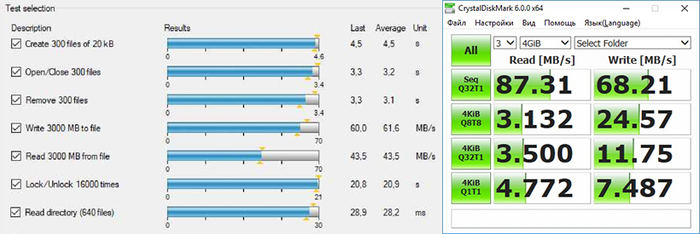
Через роутер между НАС-ом и ноутом, который подключен к роутеру вторым давно-самодельным кабелем:
Наблюдается большая разница в результатах чтения между программами.
На результаты тестирования Helios LanTest ощутимое влияние оказывает выбор конфигурации сети в настройках, поэтому настройки выбрал как в обзоре. Разбираться с КристалДиском не стал, поскольку эти тесты интересны были для сравнения с “эталоном” на сайте разработчиков Одроида. Значит и ориентироваться буду на результаты Хелиоса. Они конечно не дотягивают до рекламных показателей , но можно считать их удовлетворительными, помня что рекламные скорости были получены на ССД-диске, а мой то уже и староват.
Ну и график который порадовал – нагрузка на процессор роутера при работе торрента на Одроиде:
Одновременный стрим киношки с Одроида на телек по вайфаю значимо не добавлял нагрузки на проц роутера, поэтому такой график опущен как малоинформативный.
Собственно цель поражена.
Торренты качаются, фильмы стримятся, доступ к файлам по Самбе имеется.
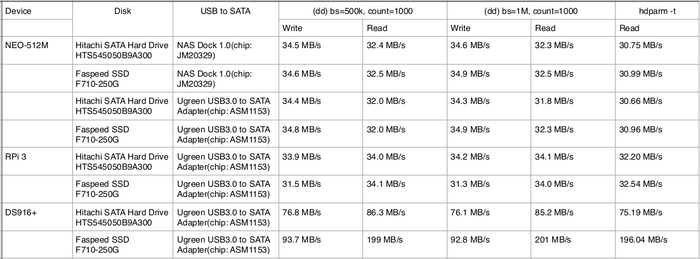
Вот тут нашлось сравнительное тестирование третьей малины и первого Нио в сравнении с Синелоджи:
Если доверять моим результатам, то одноклассники (точнее одноплатники) побеждены, ну а взрослый файловый сервер побеждает вообще всех вместе взятых, а своей стоимостью может кому-нибудь даже и контрольный сделать.
На повестке теперь стоит замена жесткого на больший, по случаю уже прикупил недорогой терабайтник, осталось только домой попасть и найти время для миграции.
Пожалуй теперь можно и подбить бабки: за около 115 бакинских (с учетом нового харда, который еще не задействован) получилась компактная и весьма вероятно энерго-эффективная коробочка, которая обгоняет по скорости ближайших конкурентов.
А еще для меня неприятным открытием стало откровенное лукавство производителей одноплатников в описании характеристик своих устройств.
Ну и хорошо бы вникнуть и разобраться в разнице результатов тестирования двух программ, потом, как-нибудь-может-быть.
Ну и для завершения, фото еще одного конкурента, который попался уже много позже, этот подороже, и может побыстрее, тесты скорости искать уже не захотел, а то вдруг расстроюсь: