Первый прототип медицинского экзоскелета. Часть 1
Хаюшки, пикабу. Хочу рассказать о ещё одном своем древнем прототипе. Это прототип полностью углепластикового мед. экзоскелета. Делался из говна, палок и синей изоленты. Всё как мы любим.
Погнали.
Медицинские экзоскелеты однозначно самые нужные и социально значимые вариации экзоскелетов. Все модификации медицинских экзоскелетов всегда востребованы и это направление, скорее всего, самое развитое из всех. Неудивительно что ещё в 2016 году подобные работы были начаты и мной и первый прототип не заставил себя долго ждать. Первый и последний экзоскелет с полным карбоновым покрытием!


Данный экзоскелет можно отнести к классическим сервоприводным экзоскелетам. В качестве сервов в нем использовались не покупные дорогие сервы, а первые пробные самодельные сервоприводы из мотор-редукторов от стеклоподъемников. Не сказать что опыт был очень успешен, но и не сказать что это был провал. Инструкция по сборке сервов была в отдельной статье.
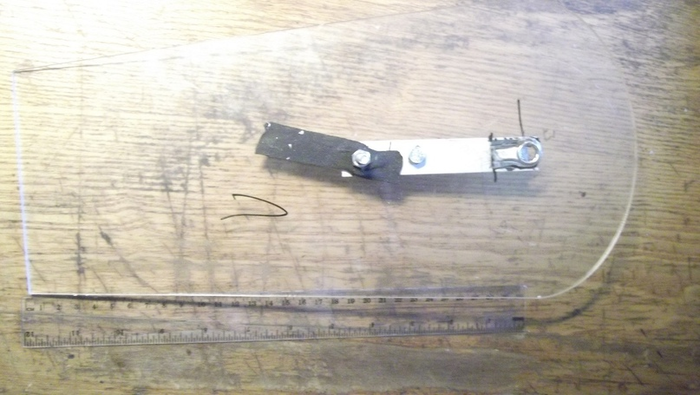
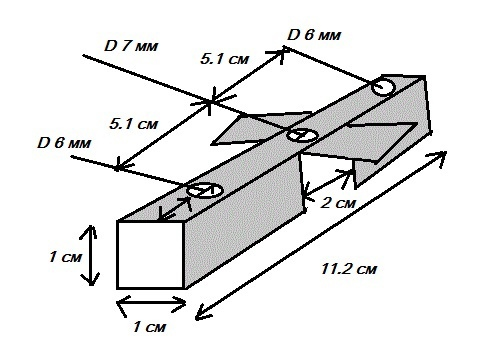
Сборка этого экзоскелета начинается с вырезания оргстекольной основы. Моделька для реза под ЧПУ фрезу в файлах группы .Этот элемент это основа колена.

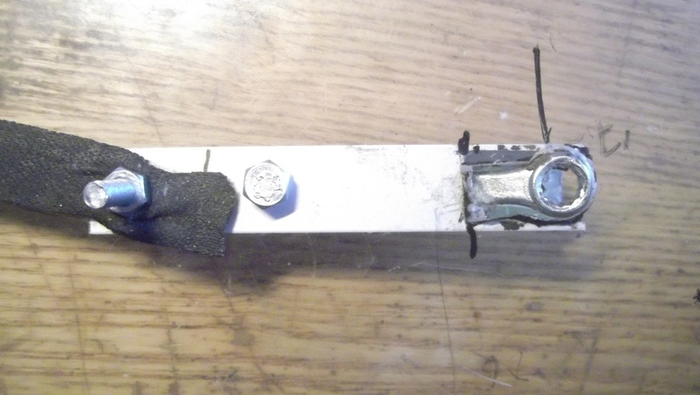
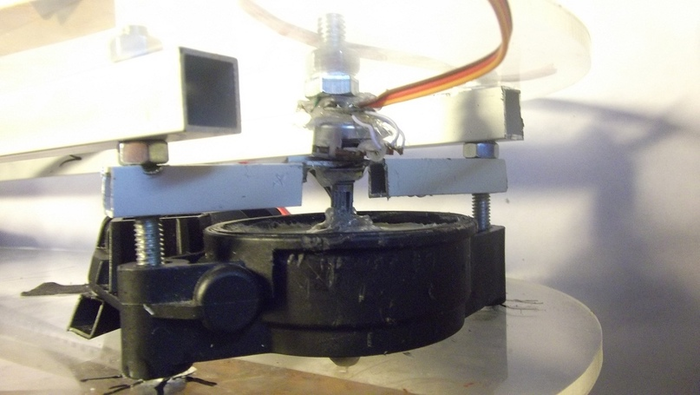
Алюминиевый элемент нужен для передачи момента от мотора к корпусу ноги. Сам элемент сделан из профиля 20 на 20 с угловым срезом с одной стороны и вырезом для вала мотора с другой. Внутри элемента продет гаечный ключ на 8. Он нужен для максимально жесткой передачи момент и является своего рода рычагом. Если делать этот рычаг из алюминия, то он конечно же уже при первых испытания свернется и сломается себе пазы т.к. момент в ноге всегда очень большой, а алюминий мягкий метал.
Всё это прошито болтами на 6 мм.
Чуть ближе это должно выглядеть вот так.
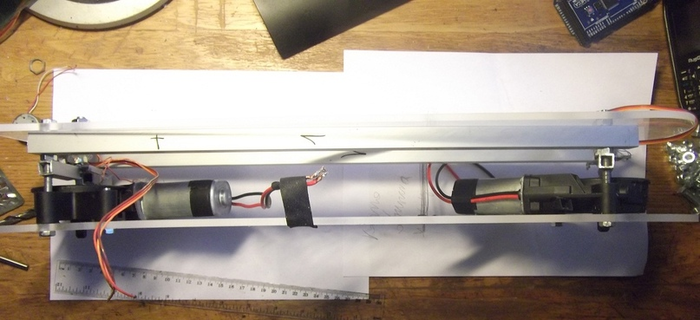
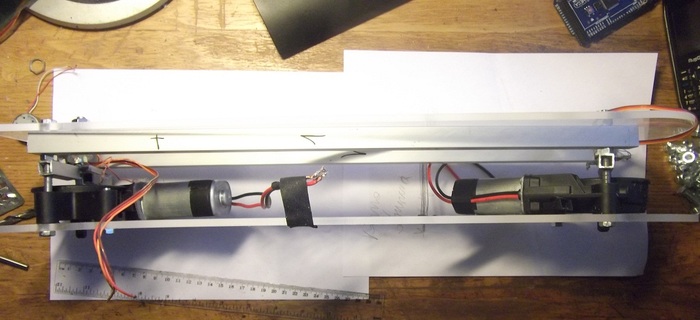
Далее нужно взять 2 мотор-редуктора, которые у нас будут использоваться как сервопривод колена и бедра, и разместить на оргстекольной другой основе. Уже бедренной. Но закреплять наши сервоприводы к оргстеклу не самая удачная мысль - нужен усиливающий каркас, дабы вес не держался просто на пластике. Для этой задачи от ушек крепления одного мотора и до ушек другого проведен кусочек алюминиевого профиля. Длину подбираем в зависимости от размеров оргстекла и нужного расположения между осью вращения колена и бедра. В среднем это 45 см для взрослого человека.
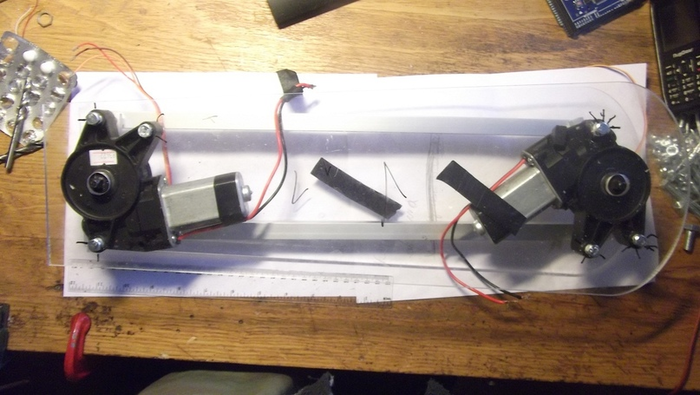
С внутренней части должны быть установлены энкодеры и крепления для продолжения оси вращения.Оси вращения мотора и продолжение осей должны совпадать дабы не было перекосов при вращении.
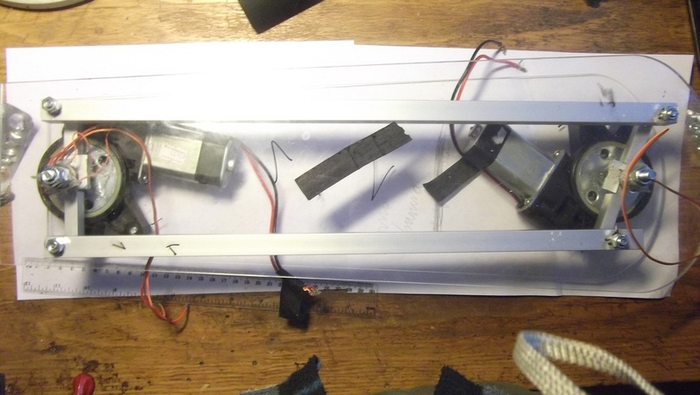
Продолжение оси вращения и энкодер крепятся через специальную деталь, сделанную из куска профиля 10 на 10 и болтов на 6мм.
Сбоку этот бедренный элемент прижимался таким же куском оргстекла как и на другой стороне. В итоге моторы и каркасы зажимались между двумя элементами оргстекла и не были видны снаружи .
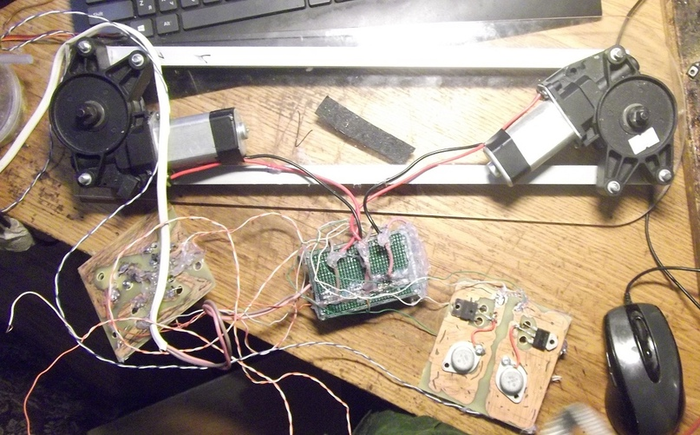
Колено будет вставляться в выходные валы моторов и полностью закрывать всё. На данный момент моторы уже должны быть преобразованы в сервприводы по стандартной методике. Особое внимание на стадии установки сервоприводов в каркас нужно уделить энкодеру. Напомню что в нашем самодельном сервоприводе должен использоваться аналоговый энкодер, который представляет из себя переменный резистор. Энкодер нужен для определения текущего положения ноги и угла поворота.Если по простому то это элемент с помощью сервопривод задает как он будет вращаться. Но при этом на оси нахождения энкодера должна быть и дополнительная выходная ось. Так что выходит что это самый напряженный и сложный участок ноги.
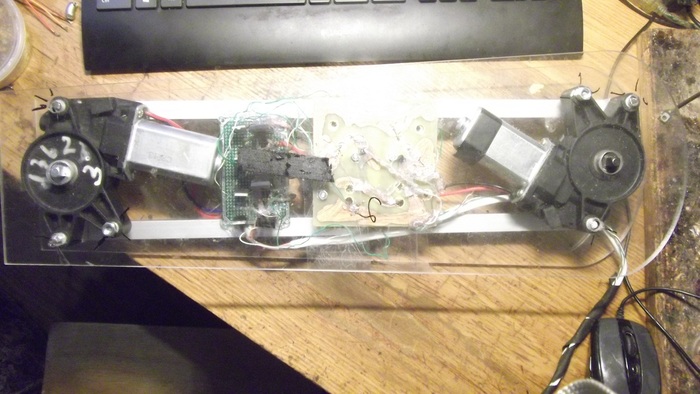
Тут можно увидеть и резистор и что самое главное "мозги" сервопривода. Взяты они с иного заводского серва. Но кроме основной контролирующей электроники в сервоприводе первой модели были и очень большие и неудобные для размещения силовые драйверы моторов. Драйверы моторов нужны для управления большим током моторов посредством слабого сигнала от контроллера сервопривода. Можно сказать это усилитель тока с возможностью менять полярности. Драйверов нужно 2 и каждый из них ещё и состоял из 2 больших блоков . В итоге у нас должно быть 4 больших платы с мощными силовыми транзисторами. И всё это должно быть размещено в бедренном элементе.
Драйверы устанавливаются на алюминиевый профильный каркас. При этом на алюминий наносится какая либо изоляция - например слой термоклея. Делается это чтобы избежать замыкания отдельных драйверов и отдельных элементов каждого драйвера.
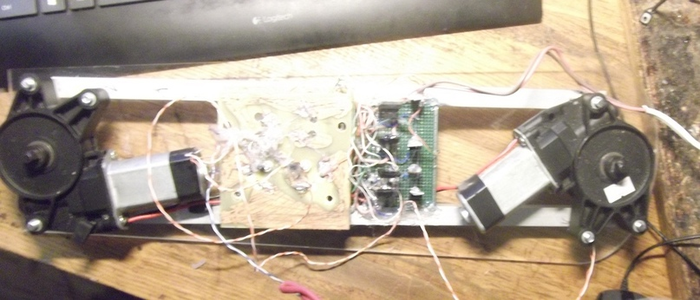
Бедренные части содержат в себе примерно 90% всей электроники данного прототипа. Остальные части - основной контролер и датчик наклона будут располагаться в спине.
После установки электронных блоков вся бедренная часть прижимается оргстекольным элементом.
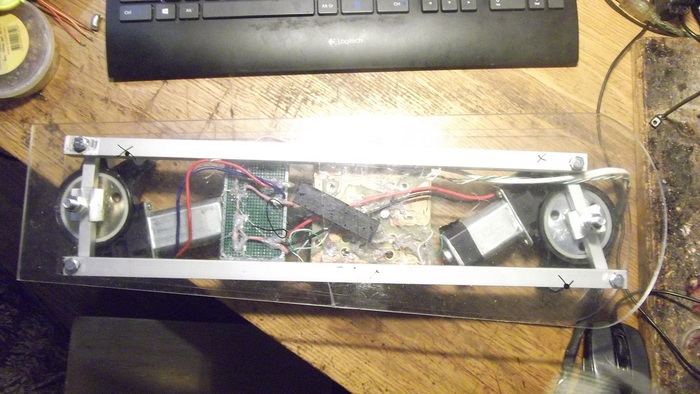
Далее берется изготовленная ещё на первом шаге коленная часть и устанавливается на оси вращения. Бедренные части должны выглядеть вот так. То есть полностью разборный и закрытый элемент.

На этом первую часть закончу. выходит уже довольно длинно.
НАПОМИНАЮ
Подробней про любые бионические устройства можно узнать в наших группах
https://www.facebook.com/Exomech
https://www.instagram.com/exomech_official/
Спасибо за внимание!