В продолжение поста Продолжение поста «Вопрос к электронщикам», я обещал что в последующие выходные все доделаю и поедем на испытания. Не сложилось, погода и физика против меня.
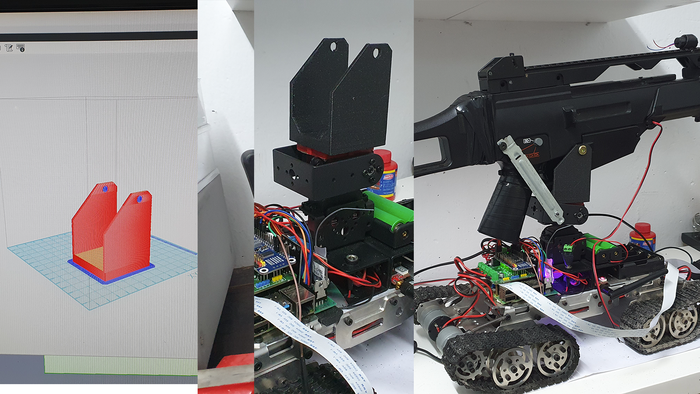
Начну с того, что, как и подозревалось, центральный вал не выдерживает нужной нагрузки:
Пришлось приклад обратно вернуть, чтобы хоть какой-то баланс выдержать. Но и так все мотыляется и пускать это в поле чревато. Однозначно нужна ротативная платформа.
Тут у меня из-за жары сгорел комп, 3Д печатать дальше не могу, а мне нужны еще направляющие, подшипник самопальный и платформа.
Поясню. В текущем виде, весь вес автомата приходится на несущую ось XY серво, ему тяжело, даже очень. Чтобы решить этот вопрос, нужен 100мм подшипник, ну или, за неимением оного (и возможности купить), можно взять кучу шариков 6мм от страйкбола и под них распечатать нужную базу. Я все задизайнил, но, принтер, сцуко, работать хочет только с софтиной от винды, которая у меня сгорела. С мака не работает никак. Ну и ладно, временные трудности.
Кроме того, нужен магазин подачи, стандартный не подходит ввиду его длины. Я уже задизайнил двухбарабанный низкий профиль, но пока не могу пустить в тираж, по той причине что озвучил выше.
В общем, жду с ебэя новую материнку + cpu + ddr4 , как прибудет и соберу - отправлю в печать всю очередь нужных деталей, там получится нормальный лафет без нагрузки на ось серво, барабанный магазин, направляющие и все остальное. :) Ждемс..