Продолжение поста «Вопрос к электронщикам»
Прошли две недели, из них неделя, собственно, пришлась на решение проблемы из прошлого поста. Но все решено, благодаря ценным унизительным комментариям комрадов. :)

Итого, из полученного опыта:
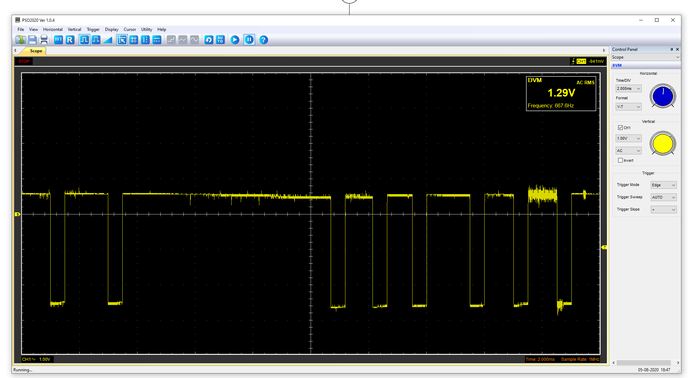
Протокол SBUS на Radiolink это почти оригинал , изменен только стартовый байт (я так понимаю, чтобы не нарваться на лицензирование). Контроллеры первый байт из пакета в 25 байт игнорируют, поэтому не видят разницы. Я, по честному, его читал и ожидал стандартный, поэтому и не получалось ничего. :)
Когда я наконец перебрал все по битам и сравнил с эмулятором футабы (да, и такие есть), подровнял код и все пошло как по маслу. Подобрал правильные подтягивающие и вытягивающие резисторы, сигнал стал мега стабильным. Далее все дело техники.
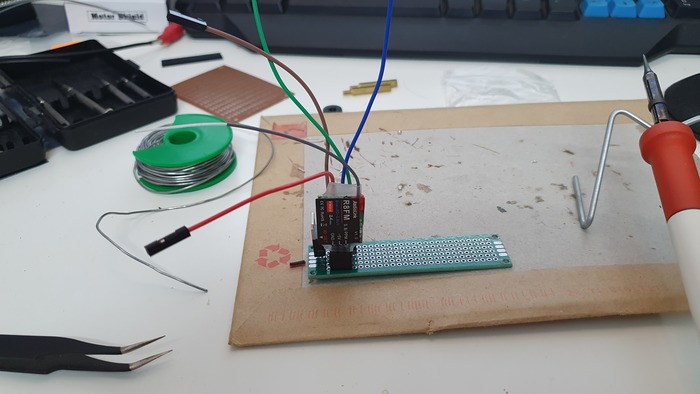
Из прототипа спаял окончательный вариант инвертора для конвертации SBUS -> UART:
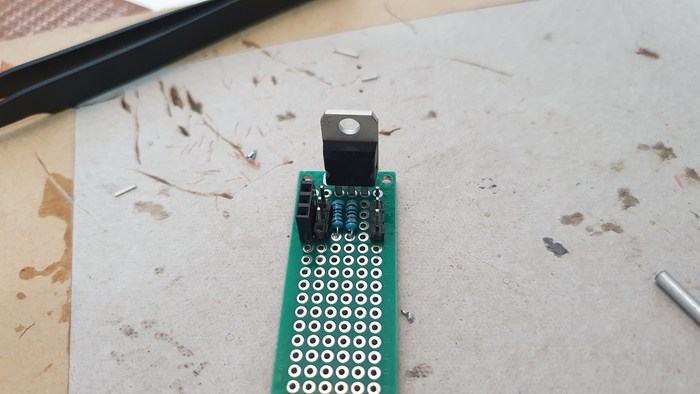
Получилось аккуратно. Разъем и пины подготовил для разных сценариев использования, как напрямую с ресивером, так и через кабель. пока осталось вот так:
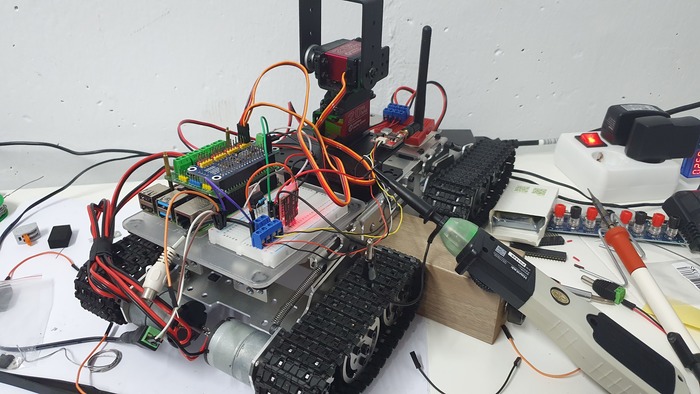
Далее, ту же самую плату использовал для размещения реле и выхода видео на передатчик 5.8Ггц. Собрал все в кучу, написал весь нужный софт на управление моторами и реле, попробовал в сборе (с частью автомата):
Кстати, в теме управления моторами добился очень интересного результата. Обычные контроллеры при повороте налево например, останавливают левую гусеницу и гребут правой. Я сделал градиентный дифференциал, то есть при повороте на месте работает как танковый разворот (на месте), на скорости одна пара гусениц замедляется, другая ускоряется. Получилось очень плавное управление.
Дальше пришел черед пробовать тему камеры и управления оной, все по плану.
Далее, подумал над темой наведения, нашел старенький лазерный диод, собрал из него лазерный прицел. Пока не подвесил.
Потом разобрал все к херам, чтобы уложить провода и спаять все что на соплях висит. Сегодня вывез подопытного в поле, на эксперименты. :)
Ну и, раз есть гусеницы, как же не попробовать на бездорожье:
Ну, в общем, понятны результаты эксперимента. :)
- Центр тяжести буду смещать вниз, перенеся батарейный блок под платформу
- Верхний сегмент крепления камеры (то есть автомата) переверну, чтобы было похоже на пушечный лафет
- Все шайбы заменю (уже заменил) на гроверы, ибо раскручиваются
- На гусеницы надо напылить резину, ибо они есть жесткий пластик и скользят на бетоне и камнях.
Виден свет в конце тоннеля, через неделю вундервафля будет готова, в минимальной конфигурации. :)