Продолжение поста «Двухголовый»
Открываю проект.
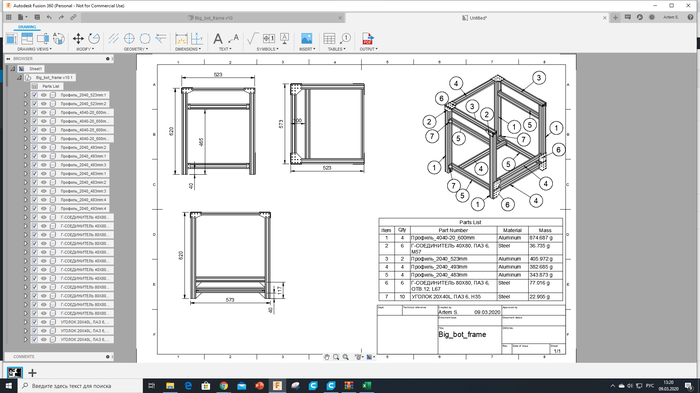
В первой части выложены чертежи рамы и спецификация.
Для сборки рамы потребуется:
- 148 комплектов метизов (закладная гайка М5 + шайба М5 + винт М5х8 или М5х10);
- металлический угольник;
- инструмент для закручивания винтов (отвертка, ключи, шестигранники).
Соединительные пластины - от "Соберизавод" (не реклама, это те материалы, которые я использовал).
Конструкционный профиль - X- или V- слот типоразмера 4020х40, 40х20 под паз 6 мм. Брал там же, где и пластины.
Рама получается вполне жесткая и достаточно массивная, чтобы глушить вибрации шаговых двигателей.
В перспективе - подготовить STL-шаблоны для печати направляющих кондукторов для сверления профиля под соединение "вглухую" (на фото ниже)

Исходник выложен ЗДЕСЬ и будет дополняться.
Во второй части будут представлены детали оси Z, в т.ч. чертежи лазерной резки подстолья.